-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.0 2022-07-29 데이터 최초 개방 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2022-10-21 신규 샘플데이터 개방 2022-07-29 콘텐츠 최초 등록 소개
자율주행드론에 대한 산업적 수요 증대로 국내 환경에 맞는 드론 관점의 비행환경 영상기반 학습용 데이터 구축
구축목적
드론 자율주행을 위한 시나리오(이륙, 착륙, 비행, 돌발상황)에 대하여 위험 객체 자율 인식이 필요, 이를 위한 시나리오별 고정객체, 동적 객체 정의 필요
-
메타데이터 구조표 데이터 영역 교통물류 데이터 유형 텍스트 , 이미지 , 비디오 데이터 형식 MP4, JPG, CSV, JSON, PCD 데이터 출처 수집 라벨링 유형 POLYGON(정적객체), B-BOX(동적객체/정적객체) 라벨링 형식 JSON 데이터 활용 서비스 배송용 드론 자율주행 데이터 구축년도/
데이터 구축량2021년/MP4 150시간, JPG/CSV/PCD/JSON 36만장 -
1. 데이터 구축 규모
1. 데이터 구축 규모 구분 전체 이륙 비행 착륙 돌발상황 배송불가 원시
데이터(분)9,000분 990분 3,200분 320분 3,590분 900분 원천
데이터
(장)360,000장 39,600장 128,000장 12,800장 143,600장 36,000장 구분 주요 내용 데이터 형태 구축량
(시간)/ 이미지 수량비고 원시데이터 25분 내외 FHD(1,920 X 1,080) MP4 영상 480개 + FC 데이터 MP4 150시간 - 정제데이터 원처데이터에 대한 프레임 단위별 이미지 데이터 + FC 데이터 JPEG, JPG, CSV 100시간 - 가공데이터 정제 데이터 100시간 + 메타데이터 데이터 JPEG, JPG, JSON 100시간 / 36만장 - 인공지능
학습용
데이터라벨링 후 데이터(JPEG, JPG, JSON, 메타데이터 데이터) JPEG, JPG, JSON 100시간 /36만장 - 2. 데이터 분포
- 시나리오 다양성 데이터 구축 분포
구분 이륙 비행 착륙 돌발상황 배송불가 전체 원시데이터(분) 990 3200 320 3590 900 9000 원천데이터(장) 39600 128000 12800 143600 36000 360000 비율 11% 36% 4% 40% 10% 100% 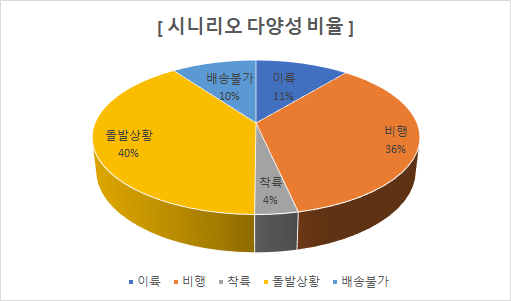
- 수집 장소별 구축 분포
구분 비율 비고 주택고밀집지역(아파트,상가) 0% 국토부지침으로 인한 획득 불가 주택저밀집지역(일반주택) 17% 일반 및 전원주택 지역 산간/도서지역 19% 산간 녹지 및 바다 등 분포 지역 농촌및기타지역 64% 농경지 및 기타 분류 지역 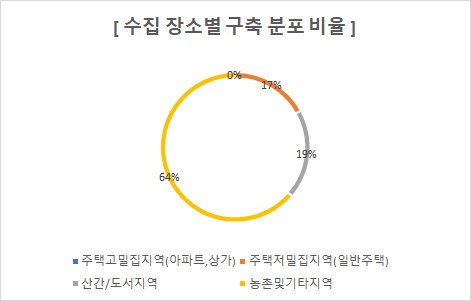
- 날씨 조건별 구축 분포
구분 원천데이터 비율 맑음 296,280 82% 흐림 63,720 18% 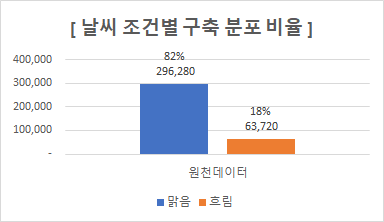
- 시간대별 구축 분포
구분 비율 오전 40% 오후 60% 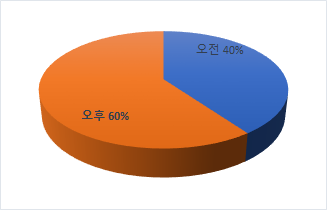
- 시나리오 다양성 데이터 구축 분포
-
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드모델선정
- 객체 분류 알고리즘 : Mask-R-CNN
– 새로운 이미지 분류기를 훈련시키는 데 필요한 시간이 감소
– 새로운 이미지 분류 시스템을 더 적은 데이터로 훈련 가능
– 전달학습을 드론 영상 데이터의 분류 네트워크 성능 고도화
– CNN 계열 중 객체인식에 대한 성능 우수
– Mask R-CNN이 모든 기존의 SOTA 네트워크보다 뛰어난 성능을 보임
– ResNet-101-FPN을 BackBone으로 갖는 Mask R-CNN이 FCIS+++보다 우수한 성능을 보임
*FCIS : Fully Convolutional Instance-Aware Semantic Segmentation (COCO 2016 segmentation challenges 우승)
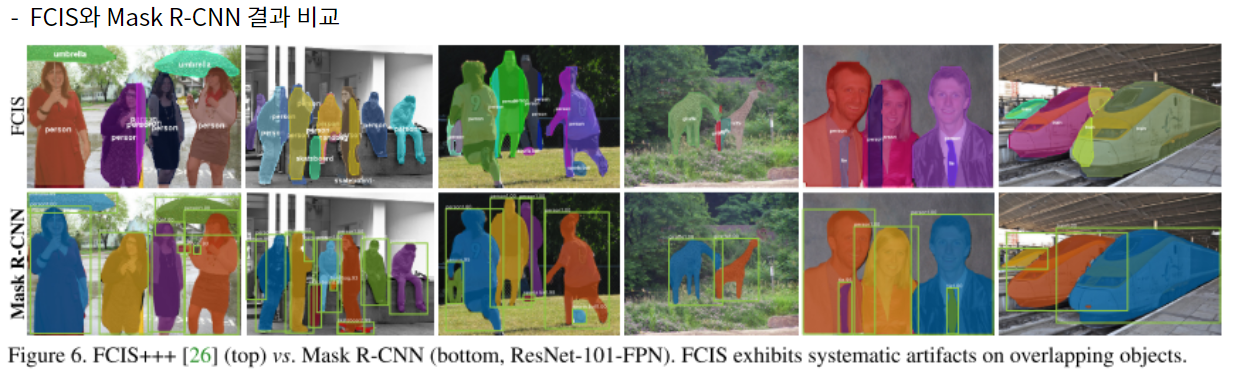
– 드론 이착륙 시 위험 객체 및 안전지역 확보는 높은 성능고 정확성을 요구하기에 이를 충족하는 Mask-R-CNN을 채택
SLAM 알고리즘
- Lego-SLAM(lightweight and ground optimized lidar odometry and mapping)
– LeGO-LOAM은 저전력 임베디드 시스템에서 실시간 포즈 추정을 달성 할 수 있기 때문에 가볍습니다. LeGOLOAM은 세분화 및 최적화 단계에서 접지면의 존재를 활용하므로 지면에 최적화
– LeGO-LOAM을 SLAM 프레임 워크에 통합하여 KITTI 데이터 세트를 사용하여 테스트 한 드리프트로 인한 포즈 추정 오류를 제거
– 기존 LOAM 알고리즘에 비해 빠르고 보다 높은 정확성을 보여줌
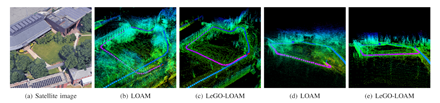
[LOAM과 LeGO-LOAM 비교]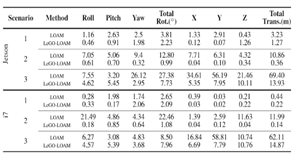
[LeGO-LOAM 오류 발생 수 비교]
– 드론 자율비행을 위한 SLAM 구축을 위한 알고리즘으로 오류율과 저전력 임베디드에서도 사용가능한 LeGO-LOAM을 채택
- 객체 분류 알고리즘 : Mask-R-CNN
-
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 폴리곤 객체 인식 Object Detection Mask R-CNN mAP@IoU 0.5 70 % 87.1 % 2 바운딩박스 객체 인식 Object Detection Mask R-CNN mAP@IoU 0.5 70 % 70.3 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드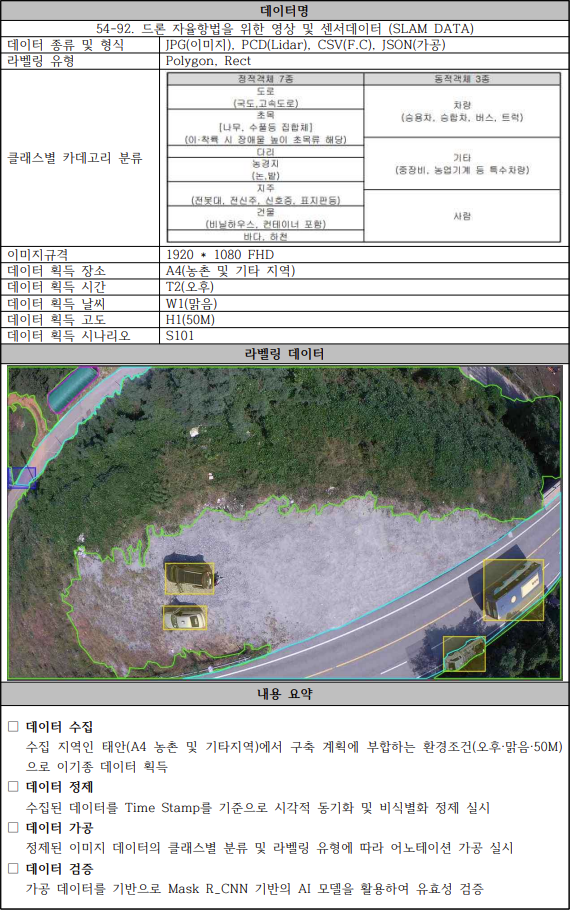
분류 분류 항목명 타입 필수여부 범위 설명 1 info object Y 정보 1.1 description string Y DRONE Dataset 데이터셋명 1.2 version string Y 버전 1.3 year number Y 2021 파일 생성 년도 1.4 contributor string Y Smartcoop Consortium 파일 제공자 1.5 date_created string Y yyyy/mm/dd
[2021/09/01~2021/12/31]데이터 취득일 2 images object Y 이미지 2.1 id number Y [00000001
~10000000]이미지 ID 2.2 width number Y [0~1920] 이미지 가로 길이 2.3 height number Y [0~1080] 이미지 세로 길이 2.4 code string [A0-T0-W0-H0-S000] 이미지 코드 2.5 file_name string Y [yymmdd_ttmmss_00000001.jpg
~yymmdd_ttmmss_10000000.jpg]이미지 파일명 3 annotations array Y 라벨링 객체 정보 3.1 id number Y [00000001
~10000000]라벨링 객체 ID 3.2 iscrowd number [0] 객체 집합 정보 3.3 image_id number Y [00000001
~10000000]이미지 ID 3.4 supercategory enum Y [static, dynamic] 대분류명 3.5 category_id enum Y [101,102,103,104,105,107,108,207,208,209] 카테고리 ID 3.6 category enum Y [road, vegetation, bridge, farmland, pole, building, water surface, person, vehicle, special vehicle“ 카테고리명 3.7 segmentation array Y 3.7.1 $value$ number Y [0~1920.0]
[0~1080.0]객체 segmentation 정보 3.8 bbox array Y 3.8.1 $value$ number Y [0~1920.0]
[0~1080.0]객체 segmentation 정보 3.9 area number Y [0~2073600] 객체 라벨링 면적 3.1 occluded number [0] 물체 겹침 정보 4 categories array Y 카테고리 정보 4.1 id enum Y "101,102,103,104,105,107,108,207,208,209" 카테고리 ID 4.2 name enum Y vegetation, bridge, farmland, pole, building, water surface, person, vehicle, special vehicle“ 카테고리명 4.3 supercategory enum Y [static, dynamic] 대분류명 5 licenses object Y 라이선스 정보 5.1 id number Y 1 라이선스 ID 5.2 name string Y Copyright 2021 National Information Society Agency. All Rights Reserved. 라이선스명 5.3 url number Y https://www.nia.or.kr/ 라이선스 URL
(NIA AI HUB url 경로)6 additional object Y 추가 정보 6.1 mission string Y [S101-S102]
[S201-S213]
[S301-S306]시나리오 코드 6.2 region_name string Y A0 촬영 지역명 코드
주택 저밀집 지역:A2
산간·도서지역:A3
농촌 및 기타지역:A46.3 ampm string Y T0 오전, 오후
(T1:오전,T2:오후)6.4 date string Y yyyy-mm-dd hh:mm:ss 데이터 취득 일시 6.5 frame_id number Y [0-5000] 데이터 프레임 번호 6.6 altitude_code string Y H0 촬영고도
(H1:50m,H2:70m,H3:80m)6.7 weather string Y W0 날씨정보
(W1:맑음,W2:흐림)6.8 drone_name number Y [1~3] 드론 구분 번호 6.9 timestamp number Y GPS 기준 UTC 6.1 pkt_timestamp number - 기체 기준 시간 6.11 pkt_name string - 센서 패킷 이름
(내부 참고용)6.12 sys_status__voltage_battery number Y 기체 배터리 전압값 6.13 gps_raw_int__time_usec number GPS_센싱 시간 6.14 gps_raw_int__lat number Y 위도 6.15 gps_raw_int__lon number Y 경도 6.16 gps_raw_int__alt number Y 고도 6.17 gps_raw_int__eph number Y GPS 수평 오차 6.18 gps_raw_int__epv number Y GPS 수직 오차 6.19 gps_raw_int__vel number Y GPS 속도 6.2 gps_raw_int__cog number Y GPS 방위각(이동방향) 6.21 gps_raw_int__satellites_visible number Y 연결된 GPS 갯수 6.22 attitude__time_boot_ms number Y 자세계 센싱시간(내부 참고용) 6.23 attitude__roll number Y 기체의 실제 roll 각도 6.24 attitude__pitch number Y 기체의 실제 pitch각도 6.25 attitude__yaw number Y 기체의 실제 yaw각도 6.26 attitude__rollspeed number Y 기체의 실제 roll회전속도 6.27 attitude__pitchspeed number Y 기체의 실제 pitch회전속도 6.28 attitude__yawspeed number Y 기체의 실제 yaw회전속도 6.29 scaled_imu2__time_boot_ms number - IMU 센싱 시간(내부 참고용) 6.3 scaled_imu2__xacc number Y X축 가속도 6.31 scaled_imu2__yacc number Y Y축 가속도 6.32 scaled_imu2__zacc number Y Z축 가속도 6.33 scaled_imu2__xgyro number Y X축 회전속도 6.34 scaled_imu2__ygyro number Y Y축 회전속도 6.35 scaled_imu2__zgyro number Y Z축 회전속도 6.36 scaled_imu2__xmag number Y 자기장 X축 좌표 6.37 scaled_imu2__ymag number Y 자기장 Y축 좌표 6.38 scaled_imu2__zmag number Y 자기장 Z축 좌표 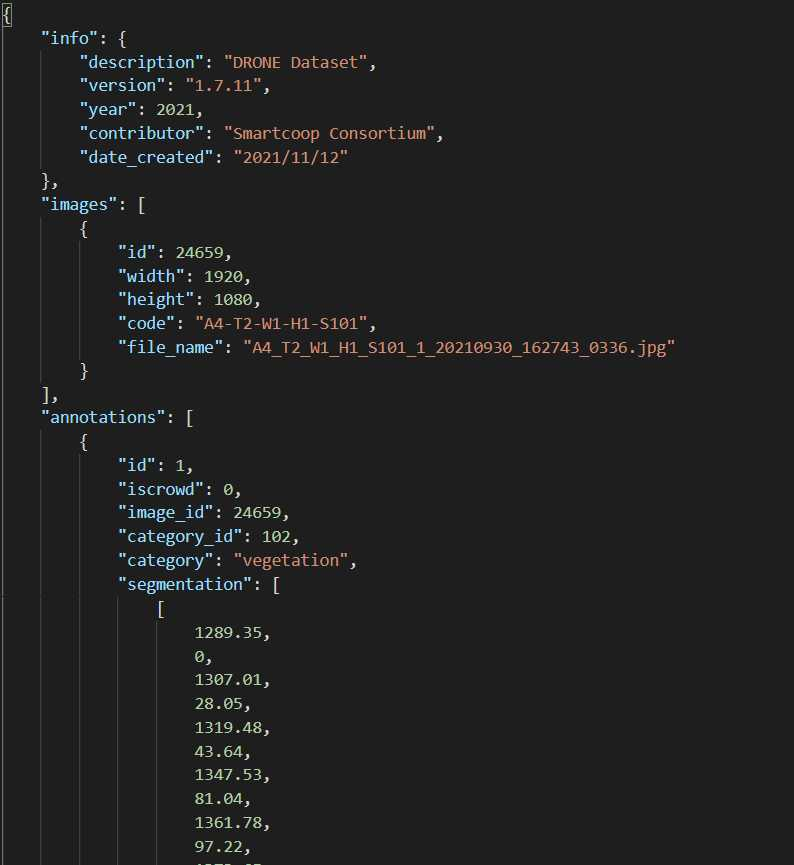
-
데이터셋 구축 담당자
수행기관(주관) : 흥일기업(주)
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 천효창 책임 02-6283-0241 hccheon@dtaas.co.kr · 사업 총괄, 책임 수행기관(참여)
수행기관(참여) 기관명 담당업무 스마트쿱(주) · 데이터 가공 ㈜가이온 · 데이터 수집 한국자동차연구원 · 데이터 정제 디노플러스(주) · AI 유효성 검증 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 천효창 책임 02-6283-0241 hccheon@dtaas.co.kr
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.