-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.0 2022-07-14 데이터 최초 개방 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2023-01-19 AI 모델 도커이미지 개방 2022-10-20 신규 샘플데이터 개방 2022-07-14 콘텐츠 최초 등록 소개
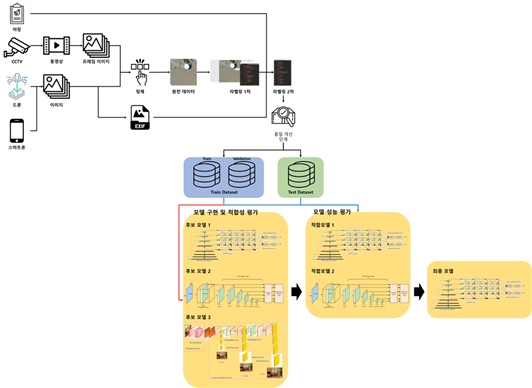
드론, 스마트폰, CCTV 영상을 활용한 학습 데이터 4종(해안쓰레기-바운딩박스, 부유쓰레기-바운딩박스, 해안쓰레기-폴리곤, 부유쓰레기-폴리곤)을 구축하여 재난, 환경 분야의 연구 또는 의사결정 지원에 활용할 수 있도록 데이터 제공
구축목적
드론 또는 카메라로 촬영한 이미지로부터 플라스틱, 금속, 유리 등의 해양쓰레기를 탐지할 수 있는 인공지능을 훈련하기 위한 데이터셋
-
메타데이터 구조표 데이터 영역 재난안전환경 데이터 유형 이미지 데이터 형식 jpg 데이터 출처 자체수집 라벨링 유형 바운딩박스(이미지), 세그멘테이션(이미지) 라벨링 형식 json 데이터 활용 서비스 해안쓰레기 모니터링 시스템 개발, 해안쓰레기 분포도 제작 등 데이터 구축년도/
데이터 구축량2021년/426,246 -
1. 데이터 구축 규모
1. 데이터 구축 규모 구축량 해안쓰레기(바운딩박스) 356,726장 부유쓰레기(바운딩박스) 48,120장 해안쓰레기(폴리곤) 18,800장 부유쓰레기(폴리곤) 2,600장 총계 426,246장
2. 데이터 분포2.데이터 분포 데이터 종류 클래스명 객체수 비율(%) 해안쓰레기(바운딩박스) Glass 120,912 6.81 Metal 290,598 16.36 Net 24,075 1.36 PET_Bottle 576,247 32.44 Plastic Buoy 100,633 5.67 Plastic Buoy(China) 22,805 1.28 Plastic ETC 265,922 14.97 Rope 121,245 6.83 Styrofoam Box 15,523 0.87 Styrofoam Buoy 86,515 4.87 Styrofoam Piece 151,767 8.54 부유쓰레기(바운딩박스) Glass 13,742 4.98 Metal 21,918 7.94 Net 19,149 6.94 PET_Bottle 41,287 14.96 Plastic Buoy 107,386 38.9 Plastic Buoy(China) 6,017 2.18 Plastic ETC 10,656 3.86 Rope 34,565 12.52 Styrofoam Box 2,733 0.99 Styrofoam Buoy 4,099 1.48 Styrofoam Piece 14,506 5.25 해안쓰레기(폴리곤) Net 13,063 22.28 Rope 45,569 77.72 부유쓰레기(폴리곤) Vegetation 9,514 100 -
-
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 객체 검출 학습 모델 (해안 쓰레기) Object Detection Mask R-CNN mAP 60 % 93.98 % 2 객체 검출 학습 모델 (부유 쓰레기) Object Detection Mask R-CNN mAP 60 % 97.4 % 3 세그멘테이션 학습 모델 (해안 쓰레기) Image Classification Swin Transformer mIoU 60 % 74.74 % 4 세그멘테이션 학습 모델 (부유 쓰레기) Image Classification Swin Transformer mIoU 60 % 85.93 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드1. 라벨링데이터 구성
- <해안쓰레기-바운딩박스>
1. 라벨링데이터 구성 해안쓰레기-바운딩박스 구분 항목명 타입 필수여부 설명 범위 비고 1 shape list Y Bbox 정보(label, points, shape_type) 1-1 label String Y Bbox의 클래스명 1-2 points float Y Bbox의 좌상단, 우하단 좌표 1-3 shape_type String Y 라벨링 형식 rectangle 2 imagePath String 이미지 데이터의 파일명 3 imageData String Json 내 이미지 정보 포함 여부 null 또는 이미지 정보 4 imageHeight int Y 이미지 높이 5 imageWidth int Y 이미지 너비 6 date String Y 촬영 날짜 YYYY-MM-DD 7 time String Y 촬영 시간 HH:MM:SS 8 device String Y 촬영 기기(플랫폼) 9 camera String Y 촬영 기기(카메라) 10 shutter float Y 셔터스피드 11 altitude int Y 촬영 고도 0~30 12 lat float Y 촬영 위치(위도) 13 lon float Y 촬영 위치(경도) 14 gtype String 배경 종류 sand, gravel, mud 15 weather String 촬영 당시 날씨 - <부유쓰레기-바운딩박스>
1. 라벨링데이터 구성 부유쓰레기-바운딩박스 구분 항목명 타입 필수여부 설명 범위 비고 1 shape list Y Bbox 정보(label, points, shape_type) 1-1 label String Y Bbox의 클래스명 1-2 points float Y Bbox의 좌상단, 우하단 좌표 1-3 shape_type String Y 라벨링 형식 rectangle 2 imagePath String 이미지 데이터의 파일명 3 imageData String Json 내 이미지 정보 포함 여부 null 또는 이미지 정보 4 imageHeight int Y 이미지 높이 5 imageWidth int Y 이미지 너비 6 date String Y 촬영 날짜 YYYY-MM-DD 7 time String Y 촬영 시간 HH:MM:SS 8 device String Y 촬영 기기(플랫폼) 9 camera String Y 촬영 기기(카메라) 10 shutter float Y 셔터스피드 11 altitude int Y 촬영 고도 0~30 12 lat float Y 촬영 위치(위도) 13 lon float Y 촬영 위치(경도) 14 gtype String 배경 종류 Brown, Blue - <해안쓰레기-폴리곤>
1. 라벨링데이터 구성 부유쓰레기-폴리곤 구분 항목명 타입 필수여부 설명 범위 비고 1 shape Y Polygon 정보 1-1 label String Y Polygon의 클래스명 1-2 points float Y Polygon의 노드 좌표 1-3 shape_type String Y 라벨링 형식 polygon 2 imagePath String 이미지 데이터의 파일명 3 imageData String Json 내 이미지 정보 포함 여부 null 또는 이미지 정보 4 imageHeight int Y 이미지 높이 5 imageWidth int Y 이미지 너비 6 date String Y 촬영 날짜 YYYY-MM-DD 7 time String Y 촬영 시간 HH:MM:SS 8 device String Y 촬영 기기(플랫폼) 9 camera String Y 촬영 기기(카메라) 10 shutter float Y 셔터스피드 11 altitude int Y 촬영 고도 0~30 12 lat float Y 촬영 위치(위도) 13 lon float Y 촬영 위치(경도) 14 gtype String 배경 종류 sand, gravel, mud 15 weather String 촬영 당시 날씨 - <부유쓰레기-폴리곤>
1. 라벨링데이터 구성 부유쓰레기-폴리곤 구분 항목명 타입 필수여부 설명 범위 비고 1 shape Y Polygon 정보 1-1 label String Y Polygon의 클래스명 1-2 points float Y Polygon의 노드 좌표 1-3 shape_type String Y 라벨링 형식 polygon 2 imagePath String 이미지 데이터의 파일명 3 imageData String Json 내 이미지 정보 포함 여부 null 또는 이미지 정보 4 imageHeight int Y 이미지 높이 5 imageWidth int Y 이미지 너비 6 date String Y 촬영 날짜 YYYY-MM-DD 7 time String Y 촬영 시간 HH:MM:SS 8 device String Y 촬영 기기(플랫폼) 9 camera String Y 촬영 기기(카메라) 10 shutter float Y 셔터스피드 11 altitude int Y 촬영 고도 0~30 12 lat float Y 촬영 위치(위도) 13 lon float Y 촬영 위치(경도) 14 gtype String 배경 종류 Brown, Blue
2. 라벨링데이터 실제예시
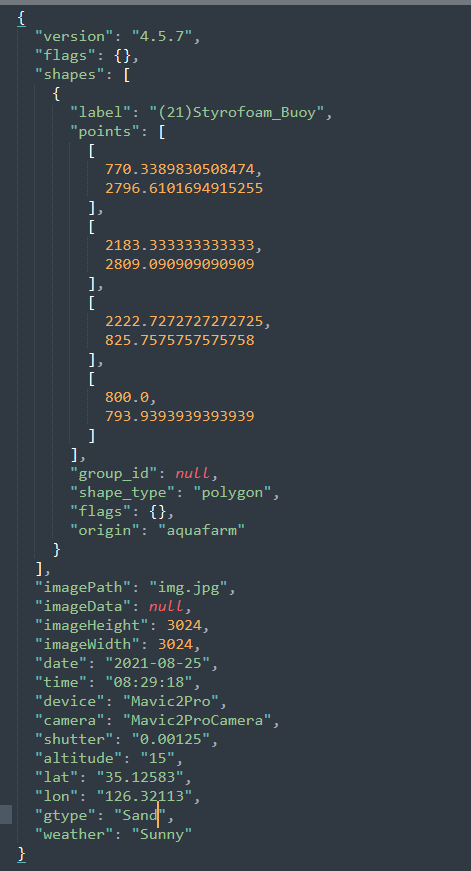
- <해안쓰레기-바운딩박스>
-
데이터셋 구축 담당자
수행기관(주관) : ㈜아이렘기술개발
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 박수호 051-723-3531 shbak@iremtech.co.kr · 과제 총괄 수행기관(참여)
수행기관(참여) 기관명 담당업무 ㈜부경해양기술 · 부유쓰레기 데이터 수집 및 가공 ㈜솔트룩스 · AI 모델 구현 ㈜솔트룩스 이노베이션 · 데이터품질 검수
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.