-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.1 2023-11-03 데이터 최종 개방 1.0 2023-07-31 데이터 개방(Beta Version) 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2025-05-08 구축업체정보 수정 2023-12-08 산출물 전체 공개 소개
자율주행 의사 결정 프로세스를 시각 인식 시스템과 추론 시스템을 분리하여 추론의 과정을 설명 가능하도록 실제 로봇주행 상황별로 데이터를 취득함 이를 위해 로봇의 서비스 공간과 임무를 가정하여 데이터를 획득
구축목적
고차원 논리규칙 상황을 인지하고 이에 따른 행동 예측 서비스를 구축하는데 사용 할 수 있는 인공지능 학습용 데이터 구축
-
메타데이터 구조표 데이터 영역 영상이미지 데이터 유형 이미지 데이터 형식 JPG 데이터 출처 자체 수집 라벨링 유형 폴리곤, 지식기반 입력 라벨링 형식 json 데이터 활용 서비스 자율주행 배송로봇서비스, 서빙 로봇서비스, 시각장애 안내로봇 데이터 구축년도/
데이터 구축량2022년/100,000 -
1. 데이터 구축 규모
1) 원천데이터 획득(가공) *취득된 원시데이터의 양을 수량으로 환산할 경우 지나치게 방대하여 생략함데이터 구축 규모 - 원천데이터 획득(가공) *취득된 원시데이터의 양을 수량으로 환산할 경우 지나치게 방대하여 생략함 파일포맷 수량 해상도 JPG 100,000개 1920*1080 2) 라벨 (가공)데이터
데이터 구축 규모 - 라벨 (가공)데이터 파일포맷 수량 라벨내용 JPG 100,000개 객체, 사람의 상태, 속성 정보 JSON 100,000개 메타 논리 규칙 기반의 텍스트 입력 2. 데이터 분포
데이터 분포 기능 예측행동 수량 기능 예측행동 수량) 주행 직진_일반 2,000 장애물 회피 정지 장애물 회피_좌회전_일반 2,000 직진_고속 2,000 정지 장애물 회피_좌회전_고속 2,000 직진_저속 2,000 정지 장애물 회피_좌회전_저속 2,000 좌회전_일반 2,000 정지 장애물 회피_우회전_일반 2,000 좌회전_고속 2,000 정지 장애물 회피_우회전_고속 2,000 좌회전_저속 2,000 정지 장애물 회피_우회전_저속 2,000 우회전_일반 2,000 접근 장애물 회피_직진_고속 2,000 우회전_고속 2,000 접근 장애물 회피_직진_저속 2,000 우회전_저속 2,000 접근 장애물 회피_좌회전_일반 2,000 후진 2,000 접근 장애물 회피_좌회전_고속 2,000 유지_통과 2,000 접근 장애물 회피_좌회전_저속 2,000 선회 선회_좌측 2,000 접근 장애물 회피_우회전_일반 2,000 선회_우측 2,000 접근 장애물 회피_우회전_고속 2,000 회전 회전_좌측 2,000 접근 장애물 회피_우회전_저속 2,000 회전_우측 2,000 추월 추월_좌회전_일반 2,000 정지 정지_일반 2,000 추월_좌회전_고속 2,000 정지_긴급 2,000 추월_좌회전_저속 2,000 정지_일시정지 2,000 추월_우회전_일반 2,000 경보(알람) 경보(알람)_화재 2,000 추월_우회전_고속 2,000 경보(알람)_침입 2,000 추월_우회전_저속 2,000 경보(알람)_요구조자발생 2,000 추월허용 추월허용_좌측 2,000 경보(알람)_흡연, 오물투척 경고 등 2,000 추월허용_우측 2,000 경보(알람)_보행시 휴대폰 사용 2,000 추종 추종 주행_좌측 2,000 추종 주행_우측 2,000 통로확보 통로확보_장애물제거(개척)_전방 2,000 통로확보_장애물제거(개척)_좌측 2,000 통로확보_장애물제거(개척)_우측 2,000 -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드- 객체 검출은 NS-VQA 중 Mask R-CNN(Fast R-CNN) and VGG에 의한 객체 검출 이후 속성 인식 목적으로 객체 검출의 경우 Mask R-CNN(Fast R-CNN) / YOLO 등에 대한 테스트 후 최종 모델 결정 개발
- 집단행동 인식의 경우 Dual-AI / HGP-SL등을 후보로 검토하되 RFP의 요구에 의한 지식베이스 적용을 위해 Cayley 등의 툴을 활용한 온톨리지 방식을 함께 적용 개발
- 객체 검출 NS-VQA(Mask R-CNN(Fast R-CNN) and VGG) : https://github.com/kexinyi/ns-vqa
- 객체 검출 YOLOv4 :
https://github.com/WongKinYiu/PyTorch_YOLOv4- 객체 검출 YOLOv7 :
https://github.com/WongKinYiu/yolov7
- 집단행동인식 :
https://github.com/kuangzijian/Improved-Actor-Relation-Graph-based-Group-Activity-Recognition
- 집단행동인식(그래프분류 방식) HGP-SL:
https://github.com/cszhangzhen/HGP-SL
- 집단행동인식(온톨로지 검색 방식) :
https://github.com/cayleygraph/cayley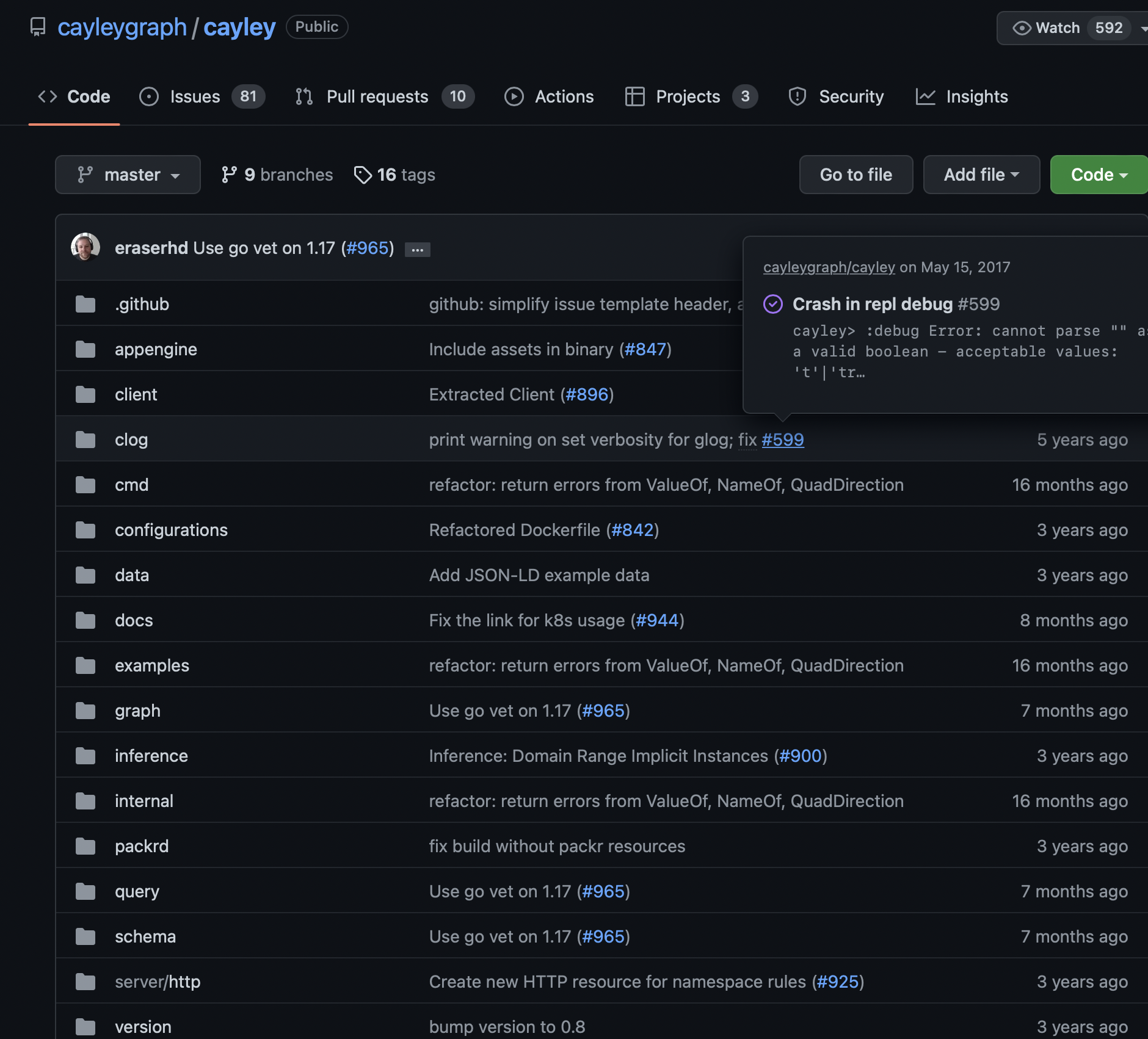
4. 활용예시
- 최종적으로 장면상황에 따라 사고 예측행동을 판단하고 지식기반으로 적절한 행동을 찾아 실행 할 수 있음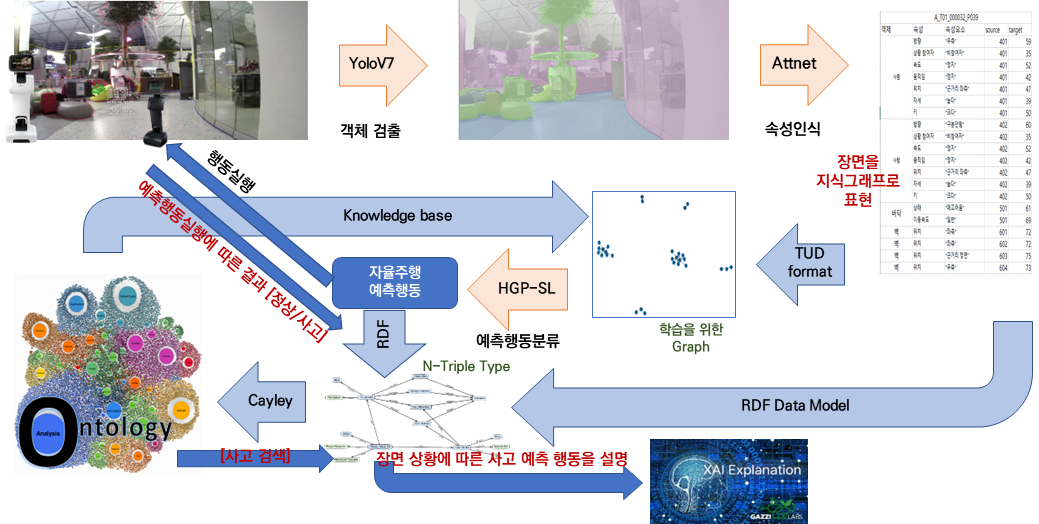
-
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 객체 검출 성능 Object Detection AttNet(ResNet-50) Accuracy 40 % 71 % 2 규칙 기반 상황 인식 성능 Image Classification GCN + MLP + HGP-SL layer Accuracy 65 % 97 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드자율주행 의사 결정 프로세스를 시각 인식 시스템과 추론 시스템을 분리하여 추론의 과정을 설명 가능하도록 실제 로봇주행 상황별로 데이터를 취득함
이를 위해 로봇의 서비스 공간과 임무를 가정하여 데이터를 획득1. 집단행동관련 객체 라벨링
- 라벨링형식 : 폴리곤
- 객체속성 : 객체, 성별, 연령, 상황참여자, 자세, 사물속성, 색상, 움직임, 위치, 크기 , 속도, 방향을 선택
- 데이터 카테고리 : 목적지 속성, 위치, 이정표 위치, 상황 혼잡도
2. 자율주행관련 객체 라벨링
- 라벨링형식 : 폴리곤
- 객체속성 : 벽, 바닥
- 데이터 카테고리 : 바닥 색상, 바닥 상태
3. 촬영장소 : 서비스 공간의 다양성 고려 8개 장소로 구분
- A:교통시설, B:공원시설, C:판매시설, D:전시시설, E:업무시설, F:교육문화시설,G:식음시설,H:의료시설로봇의 서비스 공간과 임무 가정 객체(사물) ■ 로봇이 주행하는 근거리 바닥면 상단에 위치
■ 사물이 2개 이상 중첩으로 보일 경우 하나의 객체로 라벨링객체(사람) ■ 로봇이 주행하는 근거리 바닥면 상단에 위치
■ 사람이 2명 이상 중첩으로 보일 경우 하나의 객체로 라벨링객체(이정표) ■ 바닥 및 공중에 표기된 방향표, 안내표, 이정표 목적지 ■ 예측행동 직진(일반, 고속, 저속), 정지일 경우 목적지 라벨링 작업 벽 ■ 바닥면과 수직으로 맞닿은 경계부분
■ 원근법으로 인해 소실점 경계라인이 보일 경우 2개 이상의 라벨링바닥 ■ 로봇이 주행할 수 있는 지상면적 바닥(저속) ■ 바닥 및 공중에 표기된 방향표, 안내표, 이정표 사람 ■ 비식별화되지 않은 이미지에 사람의 얼굴, 자동차 번호 등 개인정보유출에 민감한 부분은 비식별화(모자이크) 진행 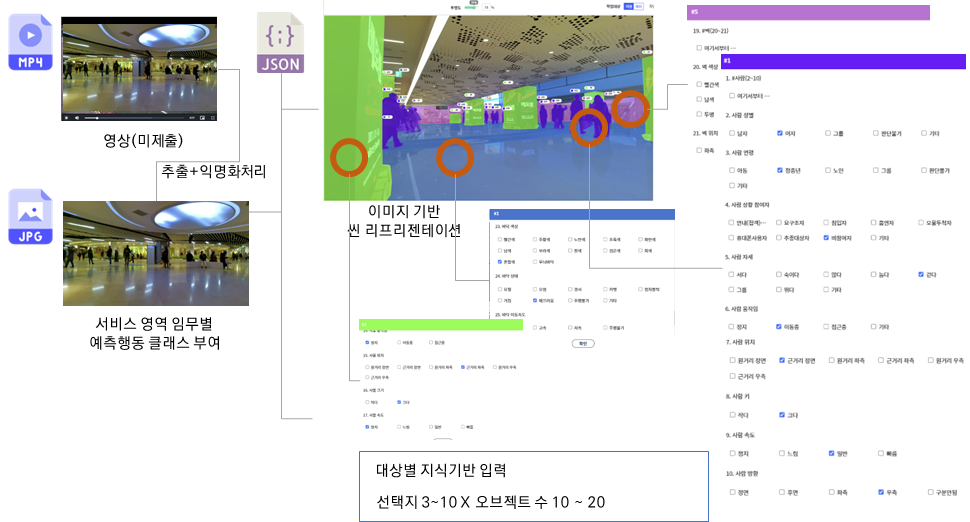
-
데이터셋 구축 담당자
수행기관(주관) : ㈜에어패스
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 김성남 02-561-1511 krksn@airpass.co.kr 데이터설계, 데이터 가공 수행기관(참여)
수행기관(참여) 기관명 담당업무 가치랩스 AI 알고리즘, 데이터 전처리, 검증 컴아트시스템 데이터 획득, 영상촬영, 데이터 정제도구 개발 경희대학교 산학협력단 AI 알고리즘, 검증 미소정보기술 저작도구 개발운영, 유지보수, 데이터 뷰어 개발 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 김성남 02-561-1511 krksn@airpass.co.kr
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.