건설기계 무인 운행 데이터
- 분야제조
- 유형 텍스트 , 이미지
-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.2 2024-12-04 서브라벨링 추가 개방 1.1 2024-10-30 데이터 최종 개방 1.0 2024-06-28 데이터 개방 Beta Version 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2024-06-28 산출물 공개 Beta Version 소개
- 숙련 운전자의 작업 노하우를 디지털화하고 이를 인공지능에 학습시켜 장비가 스스로 작업 공정을 계획하고 작업을 수행할 수 있도록 하는 스마트 건설기계 자율작업을 위한 인공지능 학습데이터
구축목적
- 건설 작업 환경의 복잡성 및 다양성으로 인해 자율작업 건설기계 개발에 난관이 있으며, 이를 해결하기 위해 숙련자 노하우 및 인공지능 기반의 지능형 건설기계 작업계획 기술 개발 요구
-
메타데이터 구조표 데이터 영역 제조 데이터 유형 텍스트 , 이미지 데이터 형식 JPG, JPEG, CSV 데이터 출처 자체 수집 라벨링 유형 바운딩박스(이미지), 세그멘테이션(이미지), 분류태그(텍스트) 라벨링 형식 json 데이터 활용 서비스 자율 굴착기 시스템 활용, 건설 자동화 시스템, 건설기계 활용 데이터 데이터 구축년도/
데이터 구축량2023년/1,215,179 -
- 데이터 규모
데이터 규모 분류 구축 규모 굴착기 장애물 탐지 데이터 50,000 작업 영역 데이터 150,000 작업순서 데이터(내부) 150,000 작업순서 데이터(외부) 150,000 자세 정보 데이터 150,000 가동 정보 데이터 150,000 롤러 작업 영역 데이터 100,000 작업순서 데이터(내부) 100,000 자세 정보 데이터 100,000 가동 정보 데이터 100,000 이미지 캡션 15,179 합계 1,215,179 - 데이터 통계
데이터 통계 항목명 분포 작업 클래스별 분포
(작업 영역 데이터, 장애물 탐지 데이터)1. 작업 영역 데이터 구분 구성비(%) 수량(건) Obstacle 32.52 672,801 Human 8.73 108,505 Background 14.28 295,347 Dump 1.52 31,385 Self 16.64 344,212 Soil 26.31 544,185 합계 100 2,068,432 2. 장애물 탐지 데이터 구분 구성비(%) 수량(건) Obstacle 77.41 64,687 Human 22.59 18,877 합계 100 83,564 고정 하위작업별 분포
(작업 순서 데이터)구분 구성비(%) 수량(건) 굴착기 Digging 11 44,024 Leveling 9.91 39,630 Dumping 5.58 22,309 Compacting 0.44 1,761 Approach 27.56 110,236 Idling 20.51 82,040 롤러 Forward 2.61 10,430 Backward 5.42 21,697 Steering 3.35 13,381 idling 13.62 54,492 합계 100 400,000 수집환경별 분포
(작업 영역 데이터)구분 구성비(%) 수량(건) Flat 98.96 247,400 Rock 1.04 2,600 합계 100 250,000 장비 종류별 구분 수량(건) 굴착기 800,000 롤러 400,000 합계 1,200,000 공정 상위 작업 수 구분 수량(건) 굴착기 Detection 50,000 Excavation&loading 138,140 Foundation&Trenching 443,465 Grading 63,608 Slope Digging 104,787 롤러 0회차 다짐 228,977 1회차 다짐 48,001 2회차 다짐 54,456 3회차 다짐 18,984 4회차 다짐 28,953 5회차 다짐 4,729 6회차 다짐 8,697 7회차 다짐 2,655 8회차 다짐 4,548 합계 1,200,000 -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드- 활용 모델
ㅇ 장애물 탐지 데이터
- 객체 탐지 모델 테스트
· 객체탐지를 위해 주행시 고려해야 할 작업환경 및 장애물 범주 정의(사람, 덤프트럭)
· YOLOv5는 경량 모델로 효율적으로 최적화되어 있어 높은 정확도와 빠른 추론 속도를 제공하며, 다중 크기와 다양한 종류의 객체를 감지하고 분류하는 데 효과적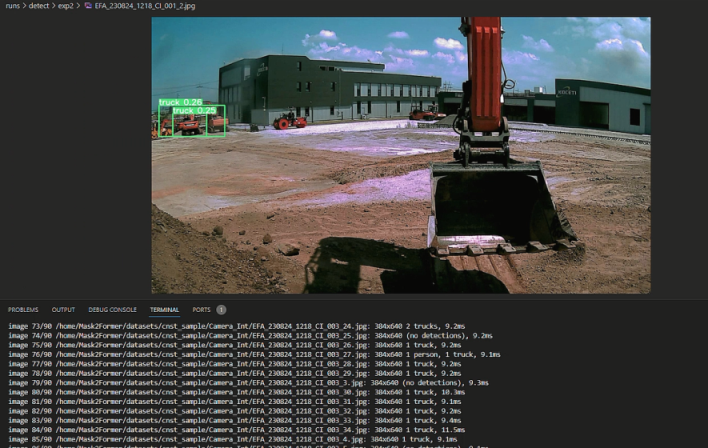
< YOLOv5 모델 구동 화면 >


< 객체 탐지 모델을 사용한 추론 이미지 >
ㅇ 작업 영역 데이터
- 팬옵틱 분할을 위한 마스크 이미지 생성
· 수집된 데이터의 json 파일을 사용하여 팬옵틱 마스크 이미지 생성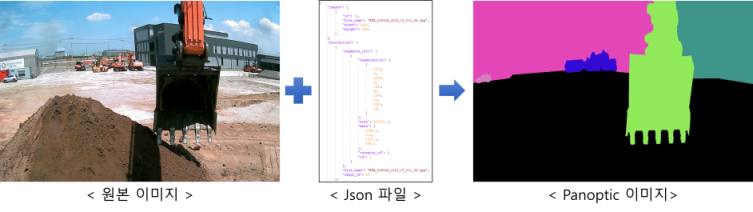
< Panoptic 이미지 변환 과정 >
- 팬옵틱 분할을 모델 테스트
· 팬옵틱 분할 모델 중 하나인 Mask2Former를 사용하여 모델 테스트 진행
· Mask2Former는 트랜스포머(Transformer) 아키텍처를 기반으로 Attention 매커니즘을 도입하여 이미지의 각 픽셀에 대한 분할(segmentation) 마스크를 예측할 수 있음
· 구축된 데이터를 학습 및 추론에 사용하였으며, PQ 78.41%를 달성함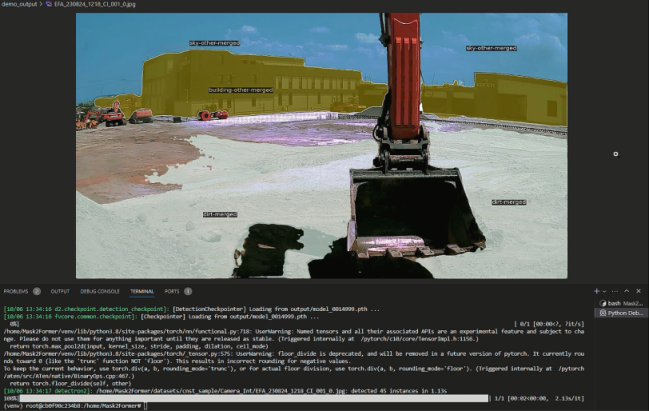
< Mask2Former 모델 구동 화면 >
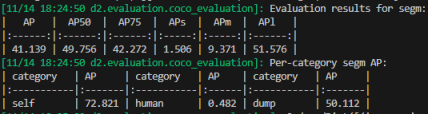
< 객체별 성능 결과 >


< 팬옵틱 분할 모델 추론 이미지 >
ㅇ 자세 정보 데이터
- 구축된 자세정보 데이터(Machine control : MC데이터) 전처리 및 후처리를 통한 데이터 정제 수행
- 데이터 EDA와 시각화를 통해 효율적인 데이터 분석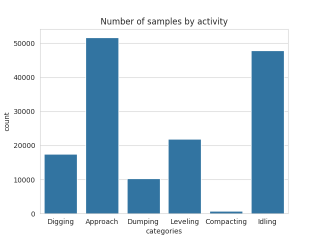
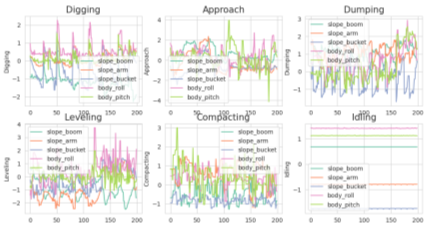
< 데이터 분석을 위한 시각화 이미지 >
- 굴착기 MC 데이터를 활용하여 학습모델 구현
- 시계열 분류 모델 테스트
· 시계열 분류 모델 중 하나인 LSTM을 사용한 모델 테스트 완료
· LSTM은 입력, 삭제, 출력 게이트 등의 메커니즘을 통해 시계열 정보의 흐름을 제어하며, 장기 의존성이 있는 시퀀스 데이터 학습에 효과적
· 시계열 모델(LSTM)을 사용하여 굴착기의 자세 정보 학습 및 추론
· 구축된 데이터를 학습 및 추론에 사용하였으며, F1-score 89.98%를 달성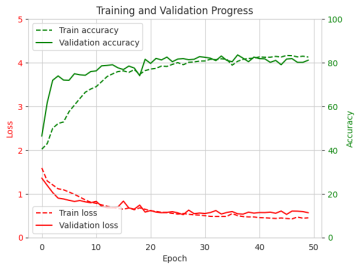
< learning curve >
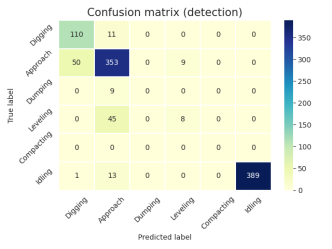
< confusion matrix >
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드- 데이터 구성
[원천데이터]
- 건설현장 10m×10m 이상의작업영역 1,000건 이상에서 데이터 수집
- 건설현장에서 운영중인 건설기계에 ROS기반 데이터 수집장치를 구성하여 시간 동기화된 데이터 확보
- 건설기계의 작업 형태에 따라 상위작업과 하위작업을 포함하는 원천 데이터 수집
[라벨링 데이터]
- 건설기계 작업영역 영상데이터
(굴착기, 롤러 2종)
- 건설기계 자세 센서 데이터
- 건설기계 TMS 데이터
- 숙련자 작업순서 라벨링(상위작업 및 하위작업)
- 건설기계 작업형태를 확인하기 위한 외부영상 데이터
[메타데이터]
- 라이다 기반 지형정보데이터
- 실시간 위치정보 등
- 어노테이션 포맷
가. 장애물 탐지 데이터_JSON어노테이션 포맷 가. 장애물 탐지 데이터_JSON 구분 속성명 타입 필수여부 설명 1 Images Array Y 이미지 정보 1-1 Images[].file_name String Y 파일 이름 1-2 Images[].height Integer Y 사진 높이 1-3 Images[].width Integer Y 사진 너비 1-4 Images[].id Integer Y 사진 아이디 2 Info Array Y 메타데이터 정보 2-1 Info[].weather String Y 현장 날씨 정보 2-2 Info[].ground_type String Y 현장 지형 정보 3 Annotations Array Y 어노테이션 정보 3-1 Annotations[].id Interger Y 어노테이션 식별자 3-2 Annotations[].image_id String Y 연관 이미지 식별자 3-3 Annotations[].category_id Interger Y 클래스 식별자 3-4 Annotations[].bbox Array Y 객체 영역 3-5 Annotations[].iscrowd Interger Y 군집 여부 4 Categories Array Y 클래스 정보 4-1 Categories[].supercategory String Y 상위 클래스 정보 4-2 Categories[].id Interger Y 클래스 식별자 4-3 Categories[].name String Y 클래스 이름 나. 작업 영역 데이터_JSON
어노테이션 포맷 나. 작업 영역 데이터_JSON 구분 속성명 타입 필수여부 설명 1 Images Array Y 이미지 정보 1-1 Images[].file_name String Y 파일 이름 1-2 Images[].height Integer Y 사진 높이 1-3 Images[].width Integer Y 사진 너비 1-4 Images[].id Integer Y 사진 아이디 2 Info Array Y 메타데이터 정보 2-1 Info[].weather String Y 현장 날씨 정보 2-2 Info[].ground_type String Y 현장 지형 정보 3 Annotations Array Y 어노테이션 정보 3-1 Annotations[].segments_info Array Y 객체 분할 정보 3-1-1 Annotations[].segments_info[].id Integer Y 객체 아이디 3-1-2 Annotations[].segments_info[].category_id Integer Y 클래스 아이디 3-1-3 Annotations[].segments_info[].iscrowd Integer Y 군집 여부 3-1-4 Annotations[].segments_info[].segmentation Arrary Y 객체 분할 영역 3-1-5 Annotations[].segments_info[].bbox Arrary Y 객체 영역 3-1-6 Annotations[].segments_info[].area Integer Y 객체 면적 3-2 Annotations[].file_name String Y 파일 이름(경로) 3-3 Annotations[].image_id Integer Y 사진 아이디 4 Categories Array Y 클래스 정보 4-1 Categories[].supercategory String Y 상위 클래스 정보 4-2 Categories[].id Interger Y 클래스 식별자 4-3 Categories[].name String Y 클래스 이름 4-4 Categories[].isthing Integer Y 객체 여부
(객체 or 배경)다. 작업 순서 데이터(내부)_JSON
어노테이션 포맷 다. 작업 순서 데이터(내부)_JSON 구분 속성명 타입 필수여부 설명 1 Info Array Y 통합 정보 1-1 Info[].description String N 설명 1-2 Info[].version String N 버전 1-3 Info[].contributor String N 기여자 1-4 Info[].date_created String N 제작 날짜 1-5 Info[].weather String Y 현장 날씨 정보 1-6 Info[].ground_type String Y 현장 지형 정보 2 Images Array Y 사진 2-1 Images[].file_name String Y 파일 이름(경로) 2-2 Images[].id Integer Y 사진 아이디 2-3 Images[].time_line Object N 사진 타임라인 2-4 Images[].categories String Y 카테고리 라. 작업 순서 데이터(외부)_JSON
어노테이션 포맷 라. 작업 순서 데이터(외부)_JSON 구분 속성명 타입 필수여부 설명 1 Info Array Y 통합 정보 1-1 Info[].description String N 설명 1-2 Info[].version String N 버전 1-3 Info[].contributor String N 기여자 1-4 Info[].date_created String N 제작 날짜 1-5 Info[].weather String Y 현장 날씨 정보 1-6 Info[].ground_type String Y 현장 지형 정보 2 Images Array Y 사진 2-1 Images[].file_name String Y 파일 이름(경로) 2-2 Images[].id Integer Y 사진 아이디 2-3 Images[].time_line Object N 사진 타임라인 2-4 Images[].categories String Y 카테고리 마. 장비 가동 정보 데이터
어노테이션 포맷 마. 장비 가동 정보 데이터 구분 속성명 타입 필수여부 설명 1 Info Array Y 통합 정보 1-1 Info[].description String N 설명 1-2 Info[].version String N 버전 1-3 Info[].contributor String N 기여자 1-4 Info[].date_created String N 제작 날짜 1-5 Info[].weather String Y 현장 날씨 정보 1-6 Info[].ground_type String Y 현장 지형 정보 2 Images Array Y 사진 2-1 Images[].file_name String Y 파일 이름(경로) 2-2 Images[].id Integer Y 사진 아이디 2-3 Images[].time_line Object N 사진 타임라인 2-4 Images[].categories String Y 카테고리 3 Data Array Y 가동 정보 데이터 3-1 Data[].image_id Integer Y 사진 아이디 3-2 Data[].TMS_info Object Y TMS 데이터 바. 장비 자세 정보 데이터
어노테이션 포맷 바. 장비 자세 정보 데이터 구분 속성명 타입 필수여부 설명 1 Info Array Y 통합 정보 1-1 Info[].description String N 설명 1-2 Info[].version String N 버전 1-3 Info[].contributor String N 기여자 1-4 Info[].date_created String N 제작 날짜 1-5 Info[].weather String Y 현장 날씨 정보 1-6 Info[].ground_type String Y 현장 지형 정보 2 Images Array Y 사진 2-1 Images[].file_name String Y 파일 이름(경로) 2-2 Images[].id Integer Y 사진 아이디 2-3 Images[].time_line Object N 사진 타임라인 2-4 Images[].categories String Y 카테고리 3 Data Array Y 자세 정보 데이터 3-1 Data[].image_id Integer Y 사진 아이디 3-2 Data[].MC_info Object Y MC 데이터 사. 이미지 캡션 데이터
어노테이션 포맷 사. 이미지 캡션 데이터 구분 속성명 타입 필수여부 설명 1 Images Array Y 사진 1-1 Images[].file_name String Y 파일 이름(경로) 2 Caption Array Y 캡션 정보 2-1 Caption[].description String Y 캡션 내용 - 데이터 포맷
aa 구분 구축 데이터 분류 원천데이터 포맷 라벨링데이터 포맷 굴착기 장애물 탐지 데이터 JPG, JPEG JSON 작업 영역 데이터 JPG, JPEG JSON 내부 작업 순서 데이터 JPG, JPEG JSON 외부 작업 순서 데이터 JPG, JPEG JSON 자세 정보 데이터 CSV JSON 가동 정보 데이터 CSV JSON 롤러 작업 영역 데이터 JPG, JPEG JSON 내부 작업 순서 데이터 JPG, JPEG JSON 자세 정보 데이터 CSV JSON 가동 정보 데이터 CSV JSON 작업 대표 이미지 JPG, JPEG JSON -
데이터셋 구축 담당자
수행기관(주관) : ㈜영신디엔씨
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 노동원 031-8027-9625 reabiin@youngshine.net 총괄실무책임자 수행기관(참여)
수행기관(참여) 기관명 담당업무 한국기계연구원 이미지 캡션 가공, 데이터 검수 ㈜써로마인드 AI 모델 개발 ㈜엠데이터싱크 데이터 가공 ㈜에스텍이엔씨 데이터 정제 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 강선구 031-8027-9619 sunsave@youngshine.net 노동원 031-8027-9625 reabiin@youngshine.net AI모델 관련 문의처
AI모델 관련 문의처 담당자명 전화번호 이메일 최종호 02-872-5127 jhchoi@surromind.ai 저작도구 관련 문의처
저작도구 관련 문의처 담당자명 전화번호 이메일 이재환 070-8806-9024 jaewhan.lee@datasync.ai 박수현 02-2220-4481 s10230@naver.com
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.