-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.2 2024-12-04 서브라벨링 추가 개방 1.1 2024-10-30 데이터 최종 개방 1.0 2024-08-05 데이터 개방 Beta Version 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2024-08-05 산출물 공개 Beta Version 소개
- 생활도로에서 차 대 사람 사고 구성비를 참고하여 데이터 설계 - 보행자의 통행이 많은 시간대 별로 분류하여 설계 - 주행환경 내 돌발상황을 고려한 엣지케이스 등을 설계 - 보행자/이륜차/전동킥보드 등과 교통약자를 고려한 시나리오 설계
구축목적
- 본 데이터는 차대 보행자 사고위험 및 치명률이 높은 골목길/생활도로에서의 동적/정적 객체 인식률 향상을 위한 가시광, 열화상 카메라, LiDAR 센서 융합 학습데이터 구축을 통해 고레벨 자율주행 연구개발 지원 및 산업육성 등으로 국내 업계의 산업경쟁력 강화지원을 목적으로 함.
-
메타데이터 구조표 데이터 영역 교통물류 데이터 유형 이미지 데이터 형식 png, pcd 데이터 출처 자체 수집 라벨링 유형 바운딩박스(이미지), 키포인트(이미지) 라벨링 형식 json 데이터 활용 서비스 인공지능 기술 개발 및 사업화 지원, 국내 인공지능 기술 혁신 데이터 구축년도/
데이터 구축량2023년/1) 원천데이터 : 가시광 카메라 40만장, 열화상 카메라 10만장, 라이다 센서 10만장 2) 다중 융합데이터 셋 : Instance Segmentation 40만장 (가시광 카메라), Bounding Box 10만장 (열화상 카메라), 3D Semantic Segmentation 10만장(라이다 센서) 3) 서브라벨링 : Keypoint 1만장, ImageCaption 1만 26장 4) 메타데이터 : GPS 센서 데이터 10만장, 융합센서 정합 파일 6개 -
- Instance Segmentation (가시광 카메라) 40만장
1) 시간대별 분포시간대별 분포 Time COUNT 비율 비고 afterschool 80,000 20.00% 하교 day 60,000 15.00% 주간 erh 80,000 20.00% 퇴근(evening rush hour) lunch 60,000 15.00% 점심 mrh 40,000 10.00% 출근/등교(morning rush hour) night 80,000 20.00% 야간 합계 400,000 100.00% 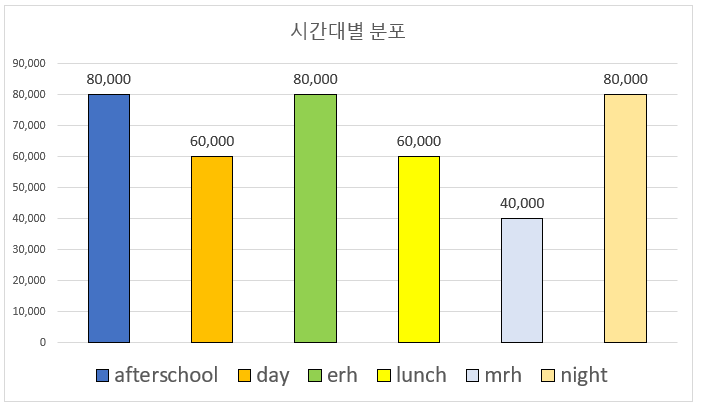
■ 출근/등교 (06:00 ~ 09:00) 4만장, 비율 10%
■ 주 간 (09:00 ~ 12:00) 6만장, 비율 15%
■ 점 심 (12:00 ~ 14:00) 6만장, 비율 15%
■ 하 교 (14:00 ~ 17:00) 8만장, 비율 20%
■ 퇴 근 (17:00 ~ 20:00) 8만장, 비율 20%
■ 야 간 (20:00 ~ 06:00) 8만장, 비율 20%2) 시나리오별 분포
시나리오별 분포 Scenario COUNT 비율 도로상황 도로형태 A01 14,248 3.56% 측방 이륜차 일반상황 A02 8,332 2.08% 측방 이륜차 컷인 일반상황 A03 10,744 2.69% 전방이륜차 추종 일반상황 A04 55,764 13.94% 도로내 평행이동 보행자 일반상황 A05 25,088 6.27% 차로 변경, 전방 대항차량 일반상황 A06 39,828 9.96% 직선/곡선로 대항차량 일반상황 A07 13,996 3.50% 직선/곡선로 대항이륜차 일반상황 A08 10,256 2.56% 교차로 대항차량 합류 일반상황 A09 14,568 3.64% 교차로 측면 대항차량 일반상황 A10 5,840 1.46% 교차로 이륜차 합류 일반상황 A11 6,156 1.54% 교차로 측방 이륜차 좌/우회전 일반상황 A12 5,288 1.32% 교차로 이륜차 도로횡단 일반상황 A13 44,996 11.25% 교차로 보행자 도로횡단 일반상황 A14 24,896 6.22% 좌/우회전시 불법 주정차 상황 일반상황 B01 5,152 1.29% 교차로 우회전, 횡단보도 위 보행자 엣지케이스 B02 9,884 2.47% 교차로 우회전 이후 무단 횡단/차도 평행통행 보행자 엣지케이스 B03 6,244 1.56% 도로 위 횡단 PM 엣지케이스 B04 3,624 0.91% 교차로 직진/좌회전, 전방 대항 PM 좌회전 엣지케이스 B05 4,472 1.12% 교차로 좌회전, 측면 대항 PM 직진/좌회전 엣지케이스 B06 4,640 1.16% 교차로 직진/좌회전, 전방 대항 이륜차 좌회전 엣지케이스 B07 4,024 1.01% 교차로 좌회전, 측면 대항 이륜차 직진/좌회전 엣지케이스 B08 11,864 2.97% 직진 중 도로횡단 보행자 엣지케이스 B09 26,292 6.57% 직진 중 차도 평행통행 보행자 엣지케이스 B10 2,720 0.68% 건물진출입 시 보도통행 보행자 엣지케이스 B11 13,272 3.32% 직진 중 가장자리 통행 보행자 엣지케이스 B12 14,788 3.70% 불법주정차 상황 도로위 보행자/PM 엣지케이스 B13 11,572 2.89% 불법주정차 상황 전방 대항차량 엣지케이스 B14 1,452 0.36% 회전교차로 우회전 전방 차량 엣지케이스 합계 400,000 100.00% 3) 클래스별 분포 (객체 수와 동일)
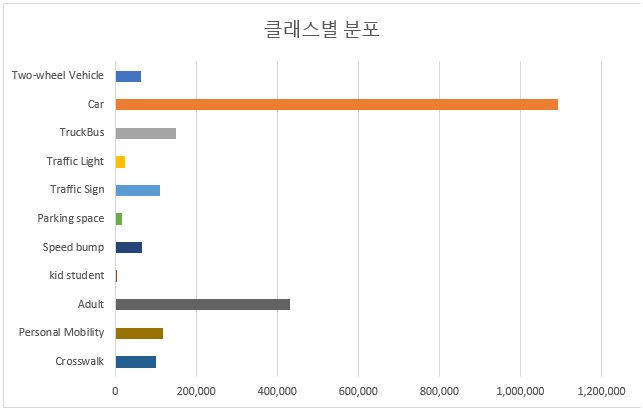
클래스별 분포 (객체 수와 동일) Category_id COUNT 비율 소분류 대분류 2 62,487 2.88% Two-wheel Vehicle vehicle 3 1,091,070 50.31% Car vehicle 8 149,100 6.87% TruckBus vehicle 10 24,216 1.12% Traffic Light Outdoor 12 109,386 5.04% Traffic Sign Outdoor 51 15,492 0.71% Parking space Outdoor 52 66,023 3.04% Speed bump Outdoor 97 4,636 0.21% kid student Pedestrian 98 429,745 19.81% Adult Pedestrian 99 117,166 5.40% Personal Mobility vehicle 100 99,557 4.59% Crosswalk Outdoor 합계 2,168,878 100.00% 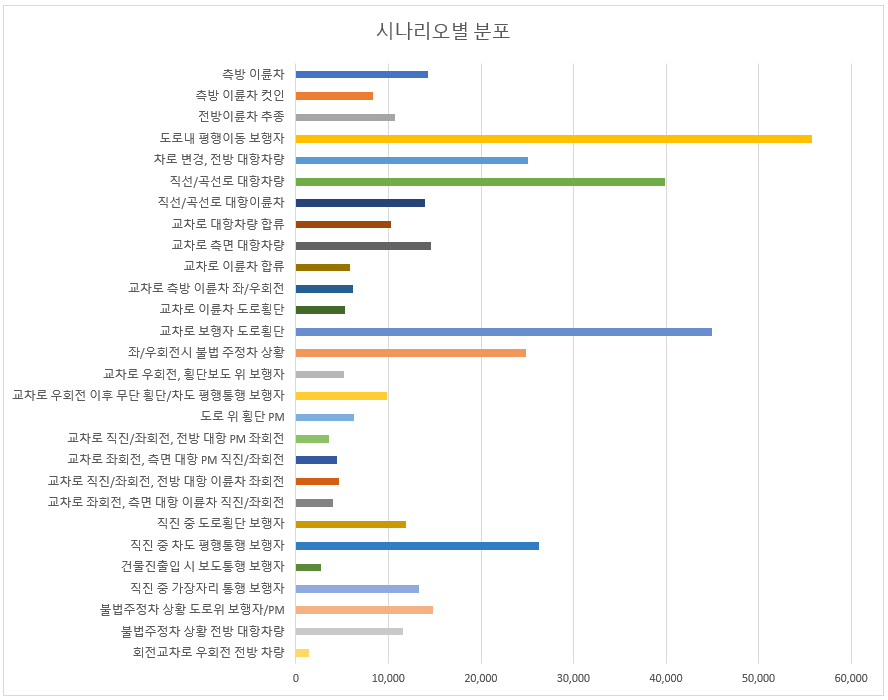
[클래스 설명]
■ Car: 원동기를 사용하여 운전되는 차량 일체
■ Two-wheel Vehicle: 이륜자전거 일체(자전거, 전기자전거),
동력으로 운행되는 이륜자동차 일체
■ TruckBus: 트럭 및 버스 차량
■ Personal Mobility: 전동 킥보드, 세그웨이 등 전동기의 동력으로 움직이는 개인형 이동장치
■ Kid student: 도로, 인도 등의 공간에 위치한 어린이, 학생 등(주로 등하교길 대상의 객체)
■ Adult: 도로, 인도 등의 공간에 위치한 사람(성인)
■ Traffic Sign: 교통 표지판(보호구역, 속도제한 표지판)
■ Traffic Light: 신호등 몸체
■ Speed bump: 과속방지턱
■ Parking space: 주차구역(도로 내 주차라인 명시된 부분, 거주가 우선주차구역 등)
■ Crosswalk: 보행자가 도로 위를 횡단할 수 있도록 안전표시로 표시한 부분4) 날씨별 분포
날씨별 분포 Weather COUNT 결과 구성비 목표 구성비 비고 clear 263,296 65.82% 65.00% 맑음 foggy 45,480 11.37% 10.00% 안개 rainy 91,224 22.81% 25.00% 강우 합계 400,000 100.00% 100.00% 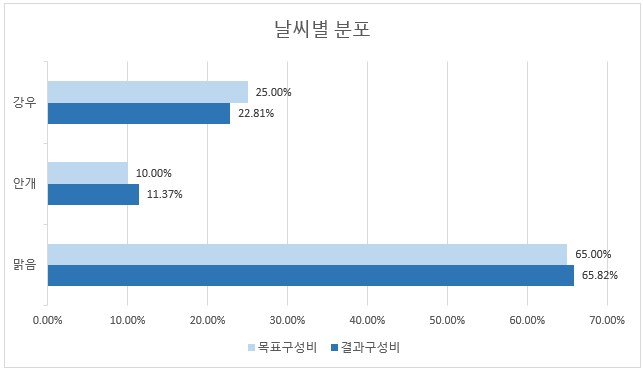
5) 도로유형별 분포
도로유형별 분포 Road COUNT 비율 최소 수량 비고 R01 61,044 15.26% 10,000 보호구역 R02 13,116 3.28% 3,000 공원도로 R03 165,980 41.50% 10,000 보차도로 R04 93,108 23.28% 10,000 보행로 분리도로 R05 65,300 16.33% 5,000 일방통행로 R06 1,452 0.36% - 회전교차로 합계 400,000 100.00% 38,000 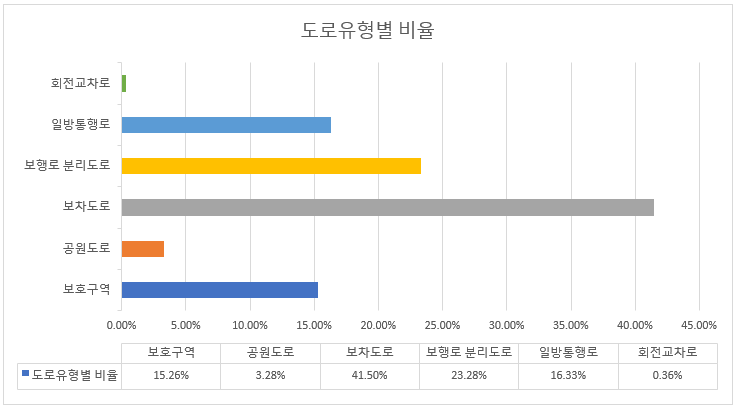
- Bounding Box (열화상 카메라) 10만장
1) 시간대별 분포시간대별 분포 Time COUNT 비율 비고 afterschool 20,000 20.00% 하교 day 15,000 15.00% 주간 erh 20,000 20.00% 퇴근(evening rush hour) lunch 15,000 15.00% 점심 mrh 10,000 10.00% 출근/등교(morning rush hour) night 20,000 20.00% 야간 합계 100,000 100.00% 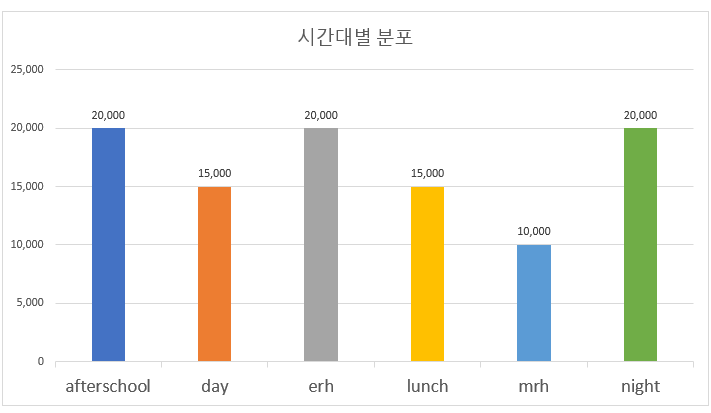
■ 출근/등교 (06:00 ~ 09:00) 2만장, 비율 10%
■ 주 간 (09:00 ~ 12:00) 1만 5천장, 비율 15%
■ 점 심 (12:00 ~ 14:00) 2만장, 비율 20%
■ 하 교 (14:00 ~ 17:00) 1만 5천장, 비율 15%
■ 퇴 근 (17:00 ~ 20:00) 1만장, 비율 10%
■ 야 간 (20:00 ~ 06:00) 2만장, 비율 20%
2) 시나리오별 분포시나리오별 분포 Scenario COUNT 비율 도로상황 도로형태 A01 3,562 3.56% 측방 이륜차 일반상황 A02 2,083 2.08% 측방 이륜차 컷인 일반상황 A03 2,686 2.69% 전방이륜차 추종 일반상황 A04 13,941 13.94% 도로내 평행이동 보행자 일반상황 A05 6,272 6.27% 차로 변경, 전방 대항차량 일반상황 A06 9,957 9.96% 직선/곡선로 대항차량 일반상황 A07 3,499 3.50% 직선/곡선로 대항이륜차 일반상황 A08 2,564 2.56% 교차로 대항차량 합류 일반상황 A09 3,642 3.64% 교차로 측면 대항차량 일반상황 A10 1,460 1.46% 교차로 이륜차 합류 일반상황 A11 1,539 1.54% 교차로 측방 이륜차 좌/우회전 일반상황 A12 1,322 1.32% 교차로 이륜차 도로횡단 일반상황 A13 11,249 11.25% 교차로 보행자 도로횡단 일반상황 A14 6,224 6.22% 좌/우회전시 불법 주정차 상황 일반상황 B01 1,288 1.29% 교차로 우회전, 횡단보도 위 보행자 엣지케이스 B02 2,471 2.47% 교차로 우회전 이후 무단 횡단/차도 평행통행 보행자 엣지케이스 B03 1,561 1.56% 도로 위 횡단 PM 엣지케이스 B04 906 0.91% 교차로 직진/좌회전, 전방 대항 PM 좌회전 엣지케이스 B05 1,118 1.12% 교차로 좌회전, 측면 대항 PM 직진/좌회전 엣지케이스 B06 1,160 1.16% 교차로 직진/좌회전, 전방 대항 이륜차 좌회전 엣지케이스 B07 1,006 1.01% 교차로 좌회전, 측면 대항 이륜차 직진/좌회전 엣지케이스 B08 2,966 2.97% 직진 중 도로횡단 보행자 엣지케이스 B09 6,573 6.57% 직진 중 차도 평행통행 보행자 엣지케이스 B10 680 0.68% 건물진출입 시 보도통행 보행자 엣지케이스 B11 3,318 3.32% 직진 중 가장자리 통행 보행자 엣지케이스 B12 3,697 3.70% 불법주정차 상황 도로위 보행자/PM 엣지케이스 B13 2,893 2.89% 불법주정차 상황 전방 대항차량 엣지케이스 B14 363 0.36% 회전교차로 우회전 전방 차량 엣지케이스 합계 100,000 100.00% 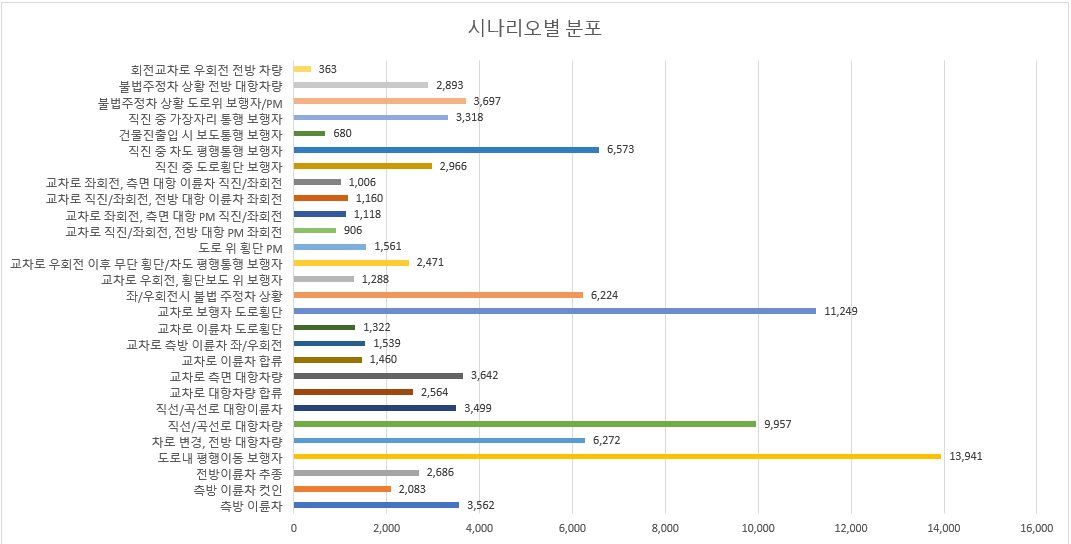
3) 클래스별 분포 (객체 수와 동일)
클래스별 분포 (객체 수와 동일) Category_id COUNT 비율 소분류 대분류 1 166,023 32.24% Pedestrian-b Pedestrian 2 33,780 6.56% Two-wheel Vehicle-b vehicle 3 280,013 54.38% car-b vehicle 8 35,058 6.81% TruckBus-b vehicle 98 3 0.00% - - 99 8 0.00% - - 합계 514,885 100.00% 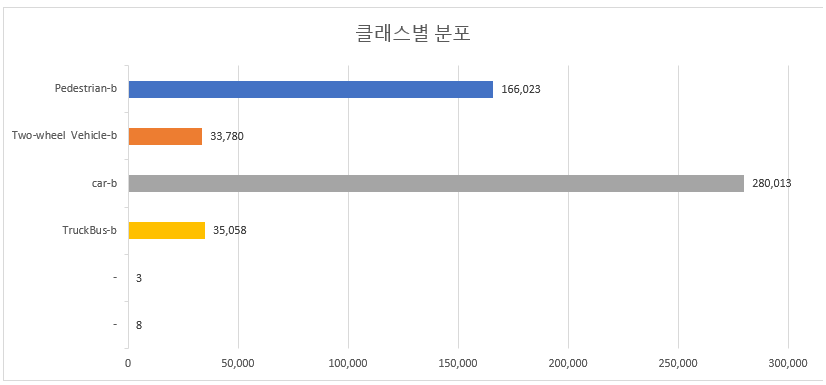
[클래스 설명]
■ car-b: 원동기를 사용하여 운전되는 차량 일체
■ Two-wheel Vehicle-b: 이륜자전거 일체 (자전거, 전기 자전거)
동력으로 운행되는 이륜자동차 일체
■ TruckBus-b: 트럭 및 버스 차량
■ Pedestrian-b: 도로, 인도 등의 공간에 위치한 사람,
서있는 상태로 탑승 가능한 PM(킥보드, 세드웨이 등) 일체4) 날씨별 분포
날씨별 분포 Weather COUNT 결과 구성비 목표 구성비 비고 clear 65,824 65.82% 65.00% 맑음 foggy 11,370 11.37% 10.00% 안개 rainy 22,806 22.81% 25.00% 강우 합계 100,000 100.00% 100.00% 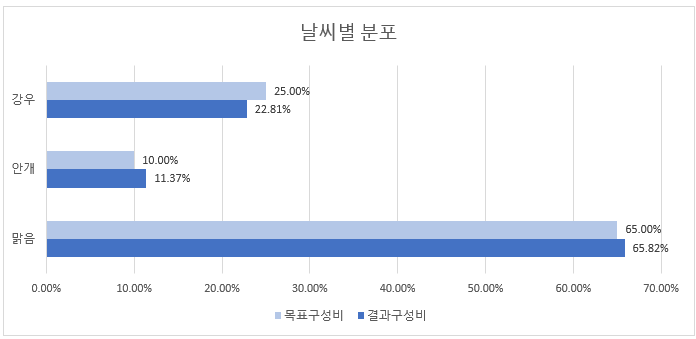
5) 도로유형별 분포
도로유형별 분포 Road COUNT 비율 최소 수량 비고 R01 15,261 15.26% 10,000 보호구역 R02 3,279 3.28% 3,000 공원도로 R03 41,495 41.50% 10,000 보차도로 R04 23,277 23.28% 10,000 보행로 분리도로 R05 16,325 16.33% 5,000 일방통행로 R06 363 0.36% - 회전교차로 합계 100,000 100.00% 38,000 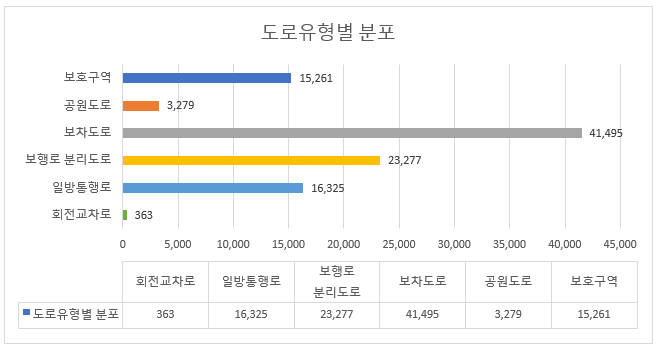
- 3D Semantic Segmentation (LiDAR) 10만장
1) 시간대별 분포시간대별 분포 Time COUNT 비율 비고 afterschool 20,000 20.00% 하교 day 15,000 15.00% 주간 erh 20,000 20.00% 퇴근(evening rush hour) lunch 15,000 15.00% 점심 mrh 10,000 10.00% 출근/등교(morning rush hour) night 20,000 20.00% 야간 합계 100,000 100.00% 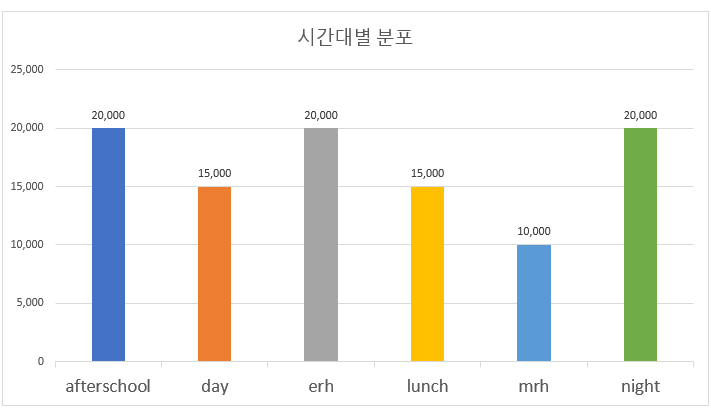
2) 시나리오별 분포
시나리오별 분포 Scenario COUNT 비율 도로상황 도로형태 A01 3,562 3.56% 측방 이륜차 일반상황 A02 2,083 2.08% 측방 이륜차 컷인 일반상황 A03 2,686 2.69% 전방이륜차 추종 일반상황 A04 13,941 13.94% 도로내 평행이동 보행자 일반상황 A05 6,272 6.27% 차로 변경, 전방 대항차량 일반상황 A06 9,957 9.96% 직선/곡선로 대항차량 일반상황 A07 3,499 3.50% 직선/곡선로 대항이륜차 일반상황 A08 2,564 2.56% 교차로 대항차량 합류 일반상황 A09 3,642 3.64% 교차로 측면 대항차량 일반상황 A10 1,460 1.46% 교차로 이륜차 합류 일반상황 A11 1,539 1.54% 교차로 측방 이륜차 좌/우회전 일반상황 A12 1,322 1.32% 교차로 이륜차 도로횡단 일반상황 A13 11,249 11.25% 교차로 보행자 도로횡단 일반상황 A14 6,224 6.22% 좌/우회전시 불법 주정차 상황 일반상황 B01 1,288 1.29% 교차로 우회전, 횡단보도 위 보행자 엣지케이스 B02 2,471 2.47% 교차로 우회전 이후 무단 횡단/차도 평행통행 보행자 엣지케이스 B03 1,561 1.56% 도로 위 횡단 PM 엣지케이스 B04 906 0.91% 교차로 직진/좌회전, 전방 대항 PM 좌회전 엣지케이스 B05 1,118 1.12% 교차로 좌회전, 측면 대항 PM 직진/좌회전 엣지케이스 B06 1,160 1.16% 교차로 직진/좌회전, 전방 대항 이륜차 좌회전 엣지케이스 B07 1,006 1.01% 교차로 좌회전, 측면 대항 이륜차 직진/좌회전 엣지케이스 B08 2,966 2.97% 직진 중 도로횡단 보행자 엣지케이스 B09 6,573 6.57% 직진 중 차도 평행통행 보행자 엣지케이스 B10 680 0.68% 건물진출입 시 보도통행 보행자 엣지케이스 B11 3,318 3.32% 직진 중 가장자리 통행 보행자 엣지케이스 B12 3,697 3.70% 불법주정차 상황 도로위 보행자/PM 엣지케이스 B13 2,893 2.89% 불법주정차 상황 전방 대항차량 엣지케이스 B14 363 0.36% 회전교차로 우회전 전방 차량 엣지케이스 합계 100,000 100.00% 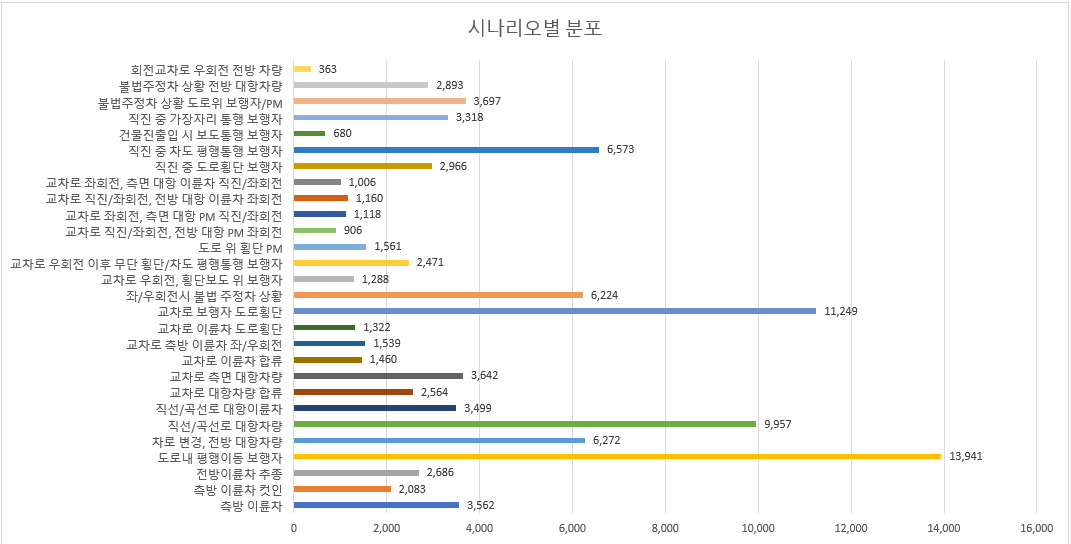
3) 클래스별 분포 (객체 수와 동일)
클래스별 분포 (객체 수와 동일) Class_id COUNT 비율 소분류 대분류 1 696,597 26.48% Pedestrian Pedestrian 2 228,859 8.70% Two-wheel Vehicle vehicle 3 1,063,860 40.44% car vehicle 8 154,588 5.88% Truck/Bus vehicle 10 15,641 0.59% Traffic Light Object 12 257,897 9.80% Traffic Sign Object 40 100,275 3.81% Road Ground 48 113,286 4.31% Sidewalk Ground 합계 2,631,003 100.00% 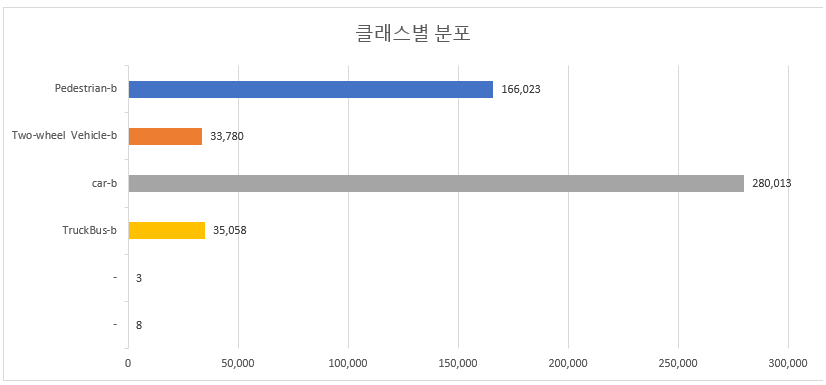
[클래스 설명]
■ car: 승용차, SUV 등 모든 차량
■ Truck/Bus: 트럭 및 버스 차량
■ Two-wheel Vehicle: 무동력으로 움직일 수 있는 자전거 일체,
엔진 동력으로 움직일 수 있는 모터 사이클 일체
■ Pedestrian: 도로, 인도, 횡단보도 등의 공간에 위치한 사람 일체,
서 있는 상태로 탐승 가능한 PM(킥보드, 세그웨이 등) 일체
■ Road: 차량이 다닐 수 있는 도로 영역
■ Sidewalk: 인도 등 보행자가 이용 가능한 도로
■ Traffic Sign: 교통 표지판(보호구역, 속도제한 표지판)
■ Traffic Light: 신호등 몸체4) 날씨별 분포
날씨별 분포 Weather COUNT 결과 구성비 목표 구성비 비고 clear 65,824 65.82% 65.00% 맑음 foggy 11,370 11.37% 10.00% 안개 rainy 22,806 22.81% 25.00% 강우 합계 100,000 100.00% 100.00% 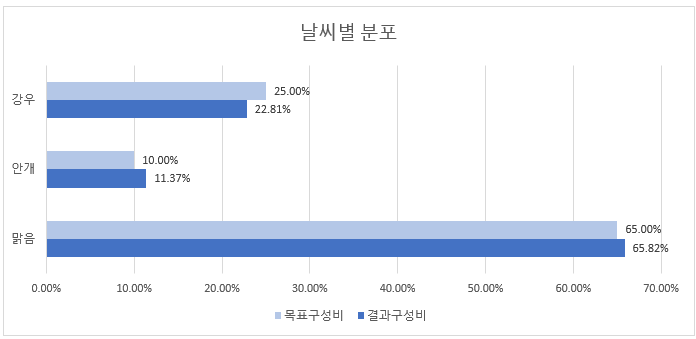
5) 도로유형별 분포
도로유형별 분포 Road COUNT 비율 최소 수량 비고 R01 15,261 15.26% 10,000 보호구역 R02 3,279 3.28% 3,000 공원도로 R03 41,495 41.50% 10,000 보차도로 R04 23,277 23.28% 10,000 보행로 분리도로 R05 16,325 16.33% 5,000 일방통행로 R06 363 0.36% - 회전교차로 합계 100,000 100.00% 38,000 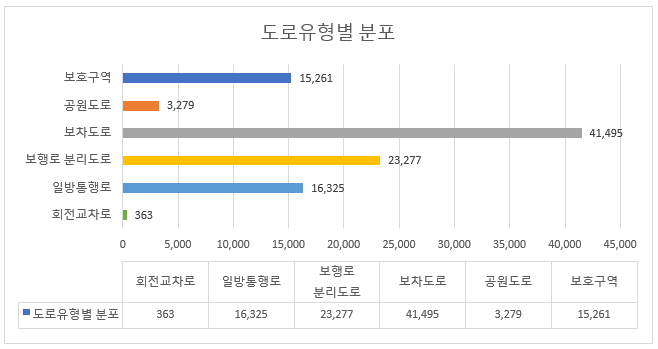
- ImageCaption 1만 26장
1) 이미지 캡션 어절 수이미지 캡션 어절 수 Value_word Count 비율 0 1 0.01% 2 1 0.01% 3 1 0.01% 4 5 0.05% 5 30 0.30% 6 199 1.98% 7 749 7.47% 8 1371 13.67% 9 1563 15.59% 10 1273 12.70% 11 920 9.18% 12 762 7.60% 13 615 6.13% 14 486 4.85% 15 412 4.11% 16 363 3.62% 17 333 3.32% 18 210 2.09% 19 172 1.72% 20 127 1.27% 21 104 1.04% 22 62 0.62% 23 51 0.51% 24 23 0.23% 25 30 0.30% 26 23 0.23% 27 14 0.14% 28 14 0.14% 29 6 0.06% 30 14 0.14% 31 11 0.11% 32 8 0.08% 33 8 0.08% 34 10 0.10% 35 10 0.10% 36 7 0.07% 37 7 0.07% 38 5 0.05% 39 6 0.06% 40 2 0.02% 41 7 0.07% 42 2 0.02% 43 2 0.02% 44 3 0.03% 45 3 0.03% 63 1 0.01% 합계 10026 100.00% 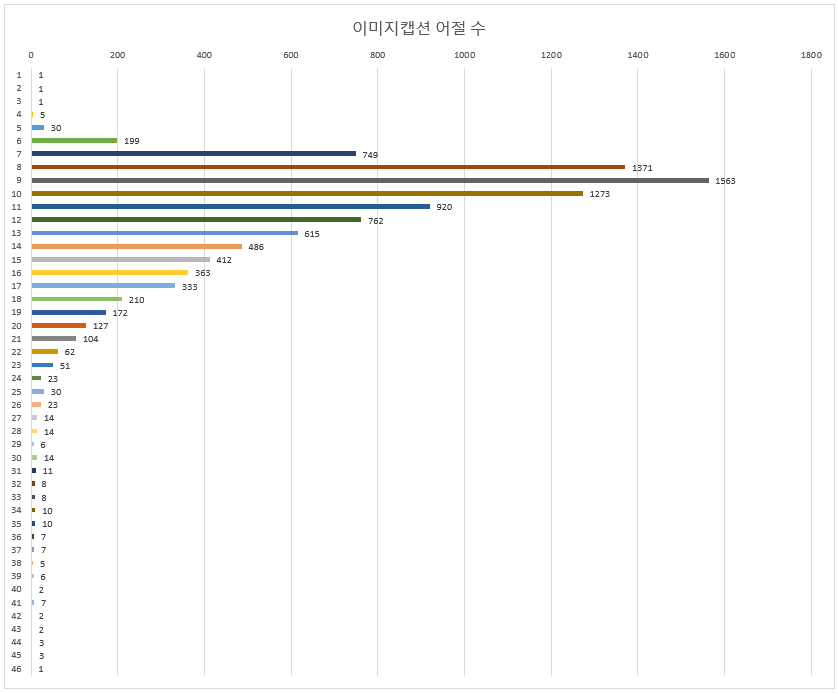
-
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드- 2D Instance Segmentation 활용 AI 모델
• ViTDet
[모델 아키텍쳐]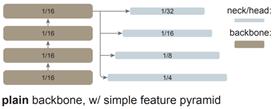
ViTDet: Exploring plain vision transformer backbones for object detection
[ECCV 2022]VitDet는 Transformer backbone 기반의 Object Detection/Instance Segmentation 프레임워크로, 기존 컴퓨터 비전 분야에서 쓰이던 CNN(Convolutional Neural Network) 구조가 아닌 Transformer 모듈 기반의 ViT(Vision Transformer) 구조의 backbone 네트워크로 사용한다.
- 2D Bounding Box 활용 AI 모델
• RTMDet
[모델 아키텍쳐]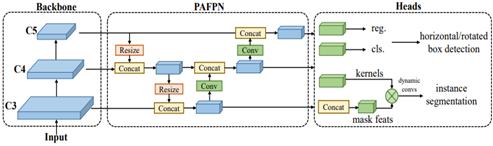
RTMDet는 고속으로 동작하는 Object Detection 모델로 자율주행차는 주변 환경을 빠르게 인식하고 위험을 피해야 하기 때문에 고속으로 동작하는 Real-Time Object Detection에서 뛰어난 성능을 보여주는 일부 YOLO모달보다 계산량이 적고, 성능이 높다.
- 3D Semantic Segmentation 활용 AI 모델
• Point Transformer V2
[모델 아키텍쳐]
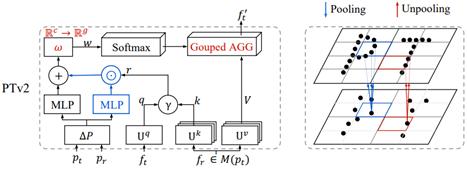
Point Transformer V2: Grouped Vector Attention and Partition-based Pooling
[NeurIPS 2022]
Point Transformer V2는 LiDAR 기반 voxel-based 3D Semantic Segmentation 모델로, Transformer 모듈에 기반하여 효율적인 Group vector attention 기법을 적용하였다. 파티션 기반 Pooling 기법을 적용
- Keypoint 활용 AI 모델
• VitPose
[모델 아키텍쳐]
기존 비전 트랜스포머 모듈에 특별한 도메인 지식을 포함시키지 않고도 간단한 모델 구조, 모델 크기의 확장성, 훈련 패러다임의 유연성, 그리고 모델 간 지식 전이능력의 측면에서 탁월한 능력을 발휘한다. 본 모델은 대표 벤치마크 데이터 셋인 COCO 데이터의 Pose Estimation 태스크에서 SOTA(State-of-the-art)를 기록함. -
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드- 데이터 셋 구성
1.1 Instance Segmentation(가시광 카메라) 40만장
1) 어노테이션 포멧어노테이션 포멧 구분 속성명 타입 필수여부 설명 범위 비고 1 info object N 객체 정보 및 속성 1-1 description string N 작업 정보 1-2 contributor string N 가공도구 회사 1-3 url string N 가공도구 회사 주소 1-4 date_created string N 생성 날짜 2 category array N 카테고리 2-1-1 id number N 클래스 아이디 2-1-2 name string N 클래스 명 2-1-3 category_id string N 카테고리 아이디 2-1-4 supercategory string N 객체 supercategory 3 image_properties array N 객체 속성 3-1-1 id number N 고유 번호 3-1-2 image_id number N 이미지 파일의 고유 번호 3-1-3 name string N 클래스 정보 3-1-4 type string N 이미지 속성 유형 3-1-5 value string N 속성값 4 images string N 이미지데이터 4-1-1 id number N 이미지 고유번호 4-1-2 license string N 라이센스정보 4-1-3 dataset string N 데이터셋 4-1-4 file_name string N 원천데이터 파일명 4-1-5 height number N 이미지 높이 4-1-6 width number N 이미지 넓이 5 annotations array N 어노테이션 속성 5-1-1 id number N 고유번호 5-1-2 image_id number N 이미지 고유번호 5-1-3 iscrowd number N 크라우드 고유번호 5-1-4 category_id number N 카테고리 고유번호 2, 3, 8, 10, 12, 51, 52, 97, 98, 99, 100 5-1-5 bbox array N 바운딩박스 값 5-1-6 segmentation object N 세그멘테이션 값 5-1-7 object_properties array N 객체값 6 company string Y 원시데이터 수집 기관 "V", "K" 7 png_filename string Y 원천데이터 파일명 8 scenario string Y 시나리오별 코드명 "A01","A02", "A03","A04",
"A05","A06", "A07","A08", "A09","A10", "A11","A12",
"A13", "A14", "B01", "B02", "B03", "B04", "B05", "B06", "B07", "B08", "B09", "B10", "B11", "B12", "B13", "B14"9 sensor string Y 라이다 센서 종류 "T", "C", "L", "G" 10 time string Y 원시데이터가 수집된 시간대 "mrh", "day", "lunch", "afterschool", "erh", "night" 11 weather string Y 원시데이터가 수집된 날씨 "clear", "rainy", “foggy” 12 road string Y 도로유형별 코드명 "R01","R02","R03“,”R04“,”R05“,”R06“ 2) 데이터 포맷
데이터 포맷 분류 속성명 내용 타입 대분류 images [] 이미지 정보 및 메타 정보 array annotations [] 어노테이션 정보 (중분류) array categories [] 카테고리 정보 (중분류) array 중분류
(images)id 이미지 파일의 고유 번호 int width 이미지 너비 (pixel) int height 이미지 높이 (pixel) int file_name 이미지 파일 이름 string meta 메타 정보 기록 string 중분류
(annotations)id 어노테이션 고유 번호 int image_id 이미지 파일의 고유 번호 int category_id 카테고리의 고유 번호 int segmentation []※ 어노테이션 포인트 정보
[[x1, y1, x2, y2, …],[…],…]array area 어노테이션 넓이 float bbox 어노테이션의 bbox 포인트 정보 array [x, y, width, height]※※ keypoints※※※ 키포인트 포인트의 정보 array [1, 2, 3, ... ,17] num_keypoints※※※ 키포인트 가공된 포인트의 수 int 중분류
(categories)id 카테고리 고유 번호 int name 카테고리 이름 (소분류) string supercategory 상위 카테고리 (대분류) string keypoints※※※ 스켈레톤 각 점의 정보 array [[1: Left Eye], [2: Right Eye],..[16: Right Ankle]]** skeleton []※※※ 스켈레톤 템플릿에서 각 점의 위치 array [[12, 1], […], …, [0, 16]]** 3) 데이터 예시
데이터 예시 작업 이미지 json 형태 
1.2 Bounding Box (열화상 카메라) 10만장
1) 어노테이션 포맷어노테이션 포맷 구분 속성명 타입 필수여부 설명 범위 비고 1 info object N 객체 정보 및 속성 1-1 description string N 작업 정보 1-2 contributor string N 가공도구 회사 1-3 url string N 가공도구 회사 주소 1-4 date_created string N 생성 날짜 2 category array N 카테고리 2-1-1 id number N 클래스 아이디 2-1-2 name string N 클래스 명 2-1-3 category_id string N 카테고리 아이디 2-1-4 supercategory string N 객체 supercategory 3 images string N 3-1-1 id number N 이미지 고유번호 3-1-2 license string N 3-1-3 dataset string N 3-1-4 file_name string N 원천데이터 파일명 3-1-5 height number N 이미지 높이 3-1-6 width number N 이미지 넓이 4 annotations array N 어노테이션 속성 4-1-1 id number N 고유번호 4-1-2 image_id number N 이미지 고유번호 4-1-3 iscrowd number N 크라우드 고유번호 4-1-4 category_id number N 카테고리 고유번호 1, 2, 3, 8 4-1-5 bbox array N 바운딩박스 값 4-1-6 segmentation object N 세그멘테이션 값 4-1-7 object_properties array N 객체값 5 image_properties array N 객체 속성 5-1-1 id string N 고유 번호 5-1-2 image_id string N 이미지 파일의 고유 번호 5-1-3 name string N 클래스 정보 5-1-4 type string N 이미지 속성 유형 5-1-5 value string N 속성값 6 company string Y 원시데이터 수집 기관 "V", "K" 7 png_filename string Y 원천데이터 파일명 8 scenario string Y 시나리오별 코드명 "A01", "A02", "A03", "A04", "A05", "A06", "A07", "A08", "A09", "A10", "A11", "A12", "A13", "A14", "B01", "B02", "B03", "B04", "B05", "B06", "B07", "B08", "B09", "B10", "B11", "B12", "B13", "B14" 9 sensor string Y 라이다 센서 종류 "T", "C", "L", "G" 10 time string Y 원시데이터가 수집된
시간대"mrh", "day", "lunch", "afterschool", "erh", "night" 11 weather string Y 원시데이터가 수집된
날씨"clear","rainy",“foggy” 12 road string Y 도로유형별 코드명 "R01", "R02", "R03“,”R04“, ”R05“,”R06“ 2) 데이터 포맷
데이터 포맷 분류 속성명 내용 타입 대분류 images [] 이미지 정보 및 메타 정보 array annotations [] 어노테이션 정보 (중분류) array categories [] 카테고리 정보 (중분류) array 중분류
(images)id 이미지 파일의 고유 번호 int width 이미지 너비 (pixel) int height 이미지 높이 (pixel) int file_name 이미지 파일 이름 string meta 메타 정보 기록 string 중분류
(annotations)id 어노테이션 고유 번호 int image_id 이미지 파일의 고유 번호 int category_id 카테고리의 고유 번호 int segmentation []※ 어노테이션 포인트 정보 array [[x1, y1, x2, y2, …],[…],…] area 어노테이션 넓이 float bbox 어노테이션의 bbox 포인트 정보 array [x, y, width, height]※※ keypoints※※※ 키포인트 포인트의 정보 array [1, 2, 3, ... ,17] num_keypoints※※※ 키포인트 가공된 포인트의 수 int 중분류
(categories)id 카테고리 고유 번호 int name 카테고리 이름 (소분류) string supercategory 상위 카테고리 (대분류) string keypoints※※※ 스켈레톤 각 점의 정보 array [[1: Left Eye], [2: Right Eye],..[16: Right Ankle]]** skeleton []※※※ 스켈레톤 템플릿에서 각 점의 위치 array [[12, 1], […], …, [0, 16]]** 3) 데이터 예시
데이터 예시 작업 예시 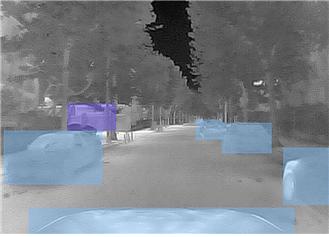
json 예시 json 예시 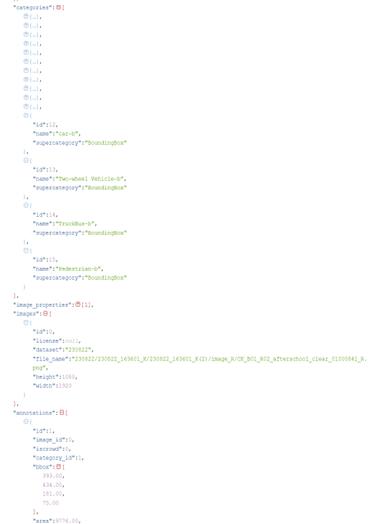
1.3 3D Semantic Segmentation (LiDAR) 10만장
1) 어노테이션 포맷어노테이션 포맷 구분 속성명 타입 필수여부 설명 범위 비고 1 annotations[] N 데이터 라벨링 정보 1-1 3D_points[] array N 객체 영역 정보 [x y, z] 1-2 class string N 객체의 클래스 "Car", "Truck/Bus", "Two-wheel Vehicle", "Pedestrian", "Road", "Sidewalk", "Traffic Sign", "Traffic Light" 1-3 class_id number N 클래스 고유 번호 3, 8, 2, 1, 40, 48, 12, 10 1-4 id number N 객체 고유 번호 1-5 distance number N ego차량과 객체 간 거리 1-6 labeling_type string N 데이터 라벨링 방식 "3D_semantic_segmentation" 2 company string Y 원시데이터 수집 기관 "V", "K" 3 pcd_filename string Y 원천데이터 파일명 4 scenario string Y 시나리오별 코드명 "A01", "A02", "A03", "A04", "A05", "A06", "A07", "A08", "A09", "A10", "A11", "A12", "A13", "A14", "B01", "B02", "B03", "B04", "B05", "B06", "B07", "B08", "B09", "B10", "B11", "B12", "B13", "B14" 5 sensor string Y 라이다 센서 종류 "T", "C", "L", "G" 7 time string Y 원시데이터가 수집된 시간대 "mrh", "day", "lunch", "afterschool", "erh", "night" 8 weather string Y 원시데이터가 수집된 날씨 "clear", "rainy", “foggy” 9 road string Y 도로유형별 코드명 "R01", "R02", "R03“, ”R04“,
”R05“, ”R06“2) 데이터 포맷
데이터 포맷 분류 속성명 내용 타입 대분류 images [] 원천데이터(PCD) 파일명 string meta 메타 정보 기록 string annotations [] 어노테이션 정보 (중분류) array 중분류
(annotations)id 객체 고유 번호 int class_id 객체 클래스 번호 int class 객체 클래스 string labeling_type 객체 라벨링 방식 string distance 수집차량과 객체간의 거리 float 3D_points 객체 영역 정보 [ [x, y, z], …] float 3) 데이터 예시
데이터 예시 작업 예시 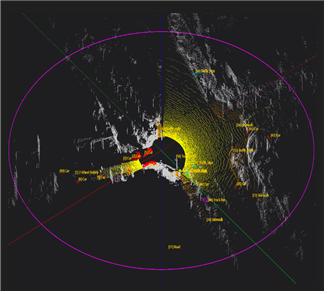
json 예시 json 예시 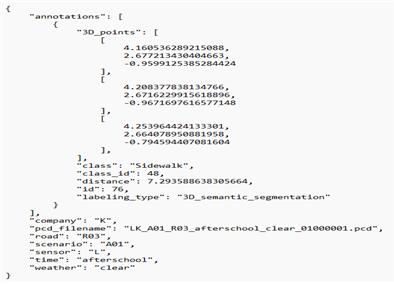
1.4 Keypoint (가시광카메라 보행자) 1만 26장
1) 어노테이션 포맷어노테이션 포맷 구분 속성명 타입 필수여부 설명 범위 비고 1 info object N 객체 정보 및 속성 1-1 description string N 작업 정보 1-2 contributor string N 가공도구 회사 1-3 url string N 가공도구 회사 주소 1-4 date_created string N 생성 날짜 2 category array N 카테고리 2-1-1 id number N 클래스 아이디 2-1-2 name string N 클래스 명 "Pedestrian" 2-1-3 supercategory string N 객체 supercategory 2-1-4 keypoints array N 객체 속성 "nose", "left eye", "right eye", "left ear", "right ear", "left shoulder", "right shoulder", "left elbow", "right elbow", "left wrist", "right wrist", "left hip", "right hip", "left knee", "right_knee", "left ankle", "right ankle" 2-1-5 skeleton array N 고유 번호 3 images array N 이미지데이터 3-1-1 id number N 이미지데이터 고유번호 3-1-2 license string N 라이센스정보 3-1-3 dataset string N 데이터셋 3-1-4 file_name string N 원천데이터 파일명 3-1-5 height number N 이미지 높이 3-1-6 width number N 이미지 넓이 4 annotations array N 어노테이션 속성 4-1-1 id number N 고유번호 4-1-2 image_id string N 이미지 고유번호 4-1-3 iscrowd string N 크라우드 고유번호 4-1-4 categoty_id string N 카테고리 고유번호 4-1-5 bbox array N 바운딩박스 값 4-1-6 area number N 영역 값 4-1-7 keypoints array Y 키포인트 값 4-1-8 num_keypoints number N 키포인트 포인트 개수 5 image_properties array N 객체 속성 5-1-1 id number N 고유 번호 5-1-2 image_id number N 이미지 파일의 고유 번호 5-1-3 name string N 클래스 정보 5-1-4 type string N 이미지 속성 유형 5-1-5 value string N 속성값 2) 데이터 포맷
데이터 포맷 분류 속성명 내용 타입 대분류 images [] 이미지 정보 및 메타 정보 array annotations [] 어노테이션 정보 (중분류) array categories [] 카테고리 정보 (중분류) array 중분류
(images)id 이미지 파일의 고유 번호 int width 이미지 너비 (pixel) int height 이미지 높이 (pixel) int file_name 이미지 파일 이름 string meta 메타 정보 기록 string 중분류
(annotations)id 어노테이션 고유 번호 int image_id 이미지 파일의 고유 번호 int category_id 카테고리의 고유 번호 int segmentation []※ 어노테이션 포인트 정보 array [[x1, y1, x2, y2, …],[…],…] area 어노테이션 넓이 float bbox 어노테이션의 bbox 포인트 정보 array [x, y, width, height]※※ keypoints※※※ 키포인트 포인트의 정보 array [1, 2, 3, ... ,17] num_keypoints※※※ 키포인트 가공된 포인트의 수 int 중분류
(categories)id 카테고리 고유 번호 int name 카테고리 이름 (소분류) string supercategory 상위 카테고리 (대분류) string keypoints※※※ 스켈레톤 각 점의 정보 array [[1: Left Eye], [2: Right Eye],..[16: Right Ankle]]** skeleton []※※※ 스켈레톤 템플릿에서 각 점의 위치 array [[12, 1], […], …, [0, 16]]** 3) 데이터 예시
데이터 예시 작업 이미지 
json 형태 json 형태 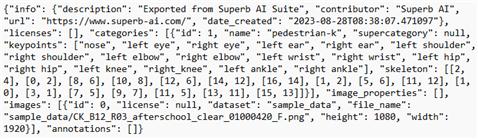
1.5 ImageCaption 1만장
1) 어노테이션 포맷어노테이션 포맷 구분 속성명 타입 필수여부 설명 범위 비고 1 info object N 객체 정보 및 속성 1-1 description string N 작업 정보 1-2 contributor string N 가공도구 회사 1-3 url string N 가공도구 회사 주소 1-4 date_created string N 생성 날짜 2 category array N 카테고리 2-1-1 id number N 클래스 아이디 2-1-2 name string N 클래스 명 2-1-3 category_id string N 카테고리 아이디 2-1-4 supercategory string N 객체 supercategory 3 images array N 이미지데이터 3-1-1 id number N 이미지데이터 고유번호 3-1-2 license string N 라이센스정보 3-1-3 dataset string N 데이터셋 3-1-4 file_name string N 원천데이터 파일명 3-1-5 height number N 이미지 높이 3-1-6 width number N 이미지 넓이 4 image_properties array N 이미지데이터 정보 4-1-1-1 id number N 이미지데이터정보 고유 번호 4-1-1-2 image_id number N 이미지 데이터 고유번호 4-1-1-3 name string N 이미지캡션 종류 4-1-1-4 type string N 이미지캡션 타입 4-1-1-5 value string Y 이미지캡션 값 2) 데이터 포맷
데이터 포맷 분류 속성명 내용 타입 대분류 images [] 이미지 정보 및 메타 정보 array annotations [] 어노테이션 정보 (중분류) array 중분류
(images)id 이미지 파일의 고유 번호 int width 이미지 너비 (pixel) int height 이미지 높이 (pixel) int file_name 이미지 파일 이름 string meta 메타 정보 기록 string 중분류
(annotations)id 어노테이션 고유 번호 int image_id 이미지 파일의 고유 번호 int caption 상황을 묘사하는 완전한 문장 string * 이미지 캡션 포맷은 MS COCO dataset의 포맷을 사용
3) 데이터 예시
데이터 예시 json 형태 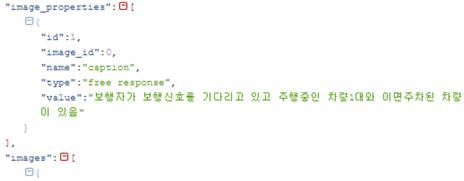
-
데이터셋 구축 담당자
수행기관(주관) : ㈜엘에프아이티
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 김광태 02-2631-6200 ktlogic@daum.net 총괄책임자 수행기관(참여)
수행기관(참여) 기관명 담당업무 한국자동차연구원 데이터 수집 ㈜뷰런테크놀로지 데이터 수집 ㈜브레인컨테이너 데이터 가공 인트엣지 AI 모델 및 유효성 검증 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 김광태 02-2631-6200 ktlogic@daum.net 이정연 02-2631-6200 jylee@lfit.co.kr AI모델 관련 문의처
AI모델 관련 문의처 담당자명 전화번호 이메일 이동현 02-2631-6200 donghyeon@intedges.com 이정연 02-2631-6200 jylee@lfit.co.kr 저작도구 관련 문의처
저작도구 관련 문의처 담당자명 전화번호 이메일 이정연 02-2631-6200 jylee@lfit.co.kr 신세일 02-2631-6200 call312@braincontainer.co.kr
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.