-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.2 2024-12-04 서브라벨링 추가 개방 1.1 2024-11-04 데이터 최종 개방 1.0 2024-08-30 데이터 개방 Beta Version 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2025-05-08 구축업체 정보수정 2024-08-30 산출물 공개 Beta Version 2024-08-08 구축업체정보 수정 2024-07-18 구축업체정보 수정 소개
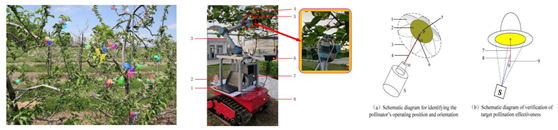
- 사과 및 배 과수원 내 농로, 노지 등에서 경로 식별 및 객체 탐지를 위한 이미지 및 센서 데이터
구축목적
- 과수원 내 농작업 무인 자동화를 위한 수확로봇, 이송로봇, 방제로봇 등에 활용 - 실내·외 비포장 경사면 노면 주행 기반의 서비스가 필요한 농작업 서비스 로봇 개발에 활용
-
메타데이터 구조표 데이터 영역 교통물류 데이터 유형 센서 , 이미지 , 텍스트 , 3D 데이터 형식 jpg, pcd 데이터 출처 각 과수원 내 실제 주행 취득 라벨링 유형 바운딩박스(이미지), 3D큐보이드(이미지), 세그멘테이션(이미지) 라벨링 형식 json 데이터 활용 서비스 과수원 자율주행을 위한 경로 식별·객체 탐지 AI 학습 모델 데이터 구축년도/
데이터 구축량2023년/사과 이미지 데이터 253,851장, 사과 포인트클라우드 데이터 138,504개, 배 이미지 데이터 251,730장, 배 포인트클라우드 데이터 180,328개, 총 이미지 데이터 505,581장, 포인트클라우드 데이터 318,832개 -
- 데이터 구축 규모
데이터 구축 규모 데이터 종류 데이터 형태 원천데이터 규모 라벨링데이터 규모 사과 과수원 이미지 데이터 RGB 253,851 253,851 배 과수원 이미지 데이터 RGB 251,730 251,730 사과 과수원 3D 데이터 포인트클라우드 138,504 138,504 배 과수원 3D 데이터 포인트클라우드 180,328 180,328 - 데이터 분포
▪ 2D 데이터데이터 분포 - 2D 데이터 구분 수량(건) 구성비(%) 사람 188,087 16.66 손수레 41,973 3.71 운반차 19,362 1.72 트럭 22,423 1.99 방제기 20,953 1.86 사다리 129,218 11.45 과수박스 150,722 13.36 창고 59,112 5.24 사과 234,493 20.78 배 봉지 47,854 4.24 비포장 101,027 8.95 기타 11,492 1.02 사과나무 67,868 6.01 배나무 33,964 3.01 합계 1,128,548 100 ▪ 3D 데이터
데이터 분포 - 3D 데이터 구분 수량(건) 구성비(%) 사람 179,315 40.56 손수레 41,349 9.36 운반차 18,563 4.2 트럭 22,212 5.03 방제기 20,901 4.73 사다리 67,409 15.25 과수박스 92,217 20.87 합계 441,966 100 -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드- 모델 학습
모델 학습 구분 모델 바운딩 박스 Faster RCNN 세그멘테이션 PV RCNN 큐보이드 DeepLab V3+ - 사용 모델
▪ Faster RCNN : 2D Object Detection
▪ PV-RCNN : LiDAR
▪ DeepLab V3+ : Semantic Segmentation- 학습용 데이터 구성(원천데이터 이미지 기준)
학습용 데이터 구성(원천데이터 이미지 기준) 데이터 구축 총량
(100%)학습 데이터
(80%)검증 데이터
(10%)테스트 데이터
(10%)824,413 647,493 88,531 88,389 - 서비스 활용 시나리오
▪ 과수 주행 로봇 : 메타 데이터 사용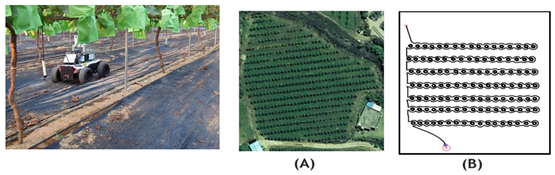
▪ 과수 수확 로봇 : 라벨링 데이터 이용
▪ 과수 방제 로봇 : 메타 데이터 + CUB + BBX + SEG 사용

-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드- 데이터 구성
데이터 구성 데이터 종류 데이터 형태 어노테이션 형태 수량 사과 과수원 이미지 데이터 RGB Bounding Box 183,884 Segmentation 69,967 사과 과수원 3D 데이터 PointCloud 3D Cuboid 138,504 배 과수원 이미지 데이터 RGB Bounding Box 210,931 Segmentation 40,799 배 과수원 3D 데이터 PointCloud 3D Cuboid 180,328 - 어노테이션 포맷
▪ 바운딩박스 라벨어노테이션 포맷 - 바운딩박스 라벨 구분 속성명 타입 필수여부 설명 1 categories array of object y 라벨 정보 1-1 id number y 라벨 번호 1-2 name string y 라벨 이름 2 images array of object y 이미지 정보 2-1 id number y 이미지 번호 2-2 width number y 이미지 폭 2-3 height number y 이미지 높이 2-4 file_name string y 이미지 파일명 3 annotations array of object y 라벨링 정보 3-1 id number y 어노테이션 식별자 3-2 image_id number y 이미지 번호 3-3 category_id number y 라벨 유형(클래스 id) 3-4 segmentation array of object n 세그멘테이션 정보 3-5 area number y 바운딩박스 전체면적 3-6 bbox array of object y 바운딩박스 정보 3-7 iscrowd number n 다중 객체 라벨 시 사용되는 변수 3-8 attributes object n 라벨 속성값 3-8-1 occluded boolean n 객체 가려짐 여부 3-8-2 rotation number n 바운딩박스 회전값 ▪ 세그멘테이션 라벨
어노테이션 포맷 - 세그멘테이션 라벨 구분 속성명 타입 필수여부 설명 1 categories array of object y 라벨 정보 1-1 id number y 라벨 번호 1-2 name string y 라벨 이름 2 images array of object y 이미지 정보 2-1 id number y 이미지 번호 2-2 width number y 이미지 폭 2-3 height number y 이미지 높이 2-4 file_name string y 이미지 파일명 3 annotations array of object y 라벨링 정보 3-1 id number y 어노테이션 식별자 3-2 image_id number y 이미지 번호 3-3 category_id number y 라벨 유형(클래스 id) 3-4 segmentation array of object y 세그멘테이션 정보 3-5 area number y 바운딩박스 전체면적 3-6 bbox array of object n 바운딩박스 정보 3-7 iscrowd number n 다중 객체 라벨 시 사용되는 변수 3-8 attributes object n 라벨 속성값 3-8-1 occluded boolean n 객체 가려짐 여부 3-8-2 rotation number n 바운딩박스 회전값 ▪ 3D큐보이드 라벨
어노테이션 포맷 - 3D큐보이드 라벨 구분 속성명 타입 필수여부 설명 1 categories array of object y 종류 1-1 label array of object y 라벨 정보 1-1-1 labels array of object y 세부라벨 1-1-1-1 name string y 세부라벨 이름 1-1-1-2 parent string n 세부라벨 종속정보 1-1-1-3 attributes array of object n 세부라벨 속성 1-1-2 attributes array of object n 라벨속성 1-2 points array of object n 포인트 정보 1-2-1 items array of object n 포인트가 사용된 파일 정보 2 items array of object y 파일 2-1 id string y 파일명 2-2 annotations array of object y 어노테이션 정보 2-2-1 id number y 어노테이션 번호 2-2-2 type string y 어노테이션 타입 2-2-3 attribute array of object n 속성정보 2-2-3-1 occluded boolean n 가림 여부 2-2-4 group number n 그룹번호 2-2-5 label_id number y 라벨 번호 2-2-6 position array of object y 라벨 x,y,z 위치 2-2-7 rotation array of object y 라벨 회전 정보 2-2-8 scale array of object y 라벨 크기 2-3 attr array of object y 프레임 2-3-1 frame number y 프레임 번호 2-4 point_cloud array of object n 포인트 클라우드 2-4-1 path string n 경로 정보 2-5 media array of object n 미디어 2-5-1 path string n 경로 정보 - 데이터 포맷
데이터 포맷 형식 확장자 원시데이터 ROS1 Bag .bag 원천데이터 이미지, 메타 데이터(센서) .jpg, .pcd, .png, .csv 라벨링 데이터 JSON .json 이미지 캡션 JSON .json - 실제 예시
실제 예시 구분 이미지 어노테이션 Bounding Box 
{
"categories": [
{
"id": 1,
"name": "사람"
},
{
"id": 2,
"name": "손수레"
},
{
"id": 3,
"name": "운반차"
},
{
"id": 4,
"name": "트럭"
},
{
"id": 5,
"name": "방제기"
},
{
"id": 6,
"name": "사다리"
},
{
"id": 7,
"name": "과수박스"
},
{
"id": 8,
"name": "창고"
},
{
"id": 9,
"name": "사과"
},
{
"id": 10,
"name": "배_봉지"
},
{
"id": 11,
"name": "비포장"
},
{
"id": 12,
"name": "기타"
},
{
"id": 13,
"name": "사과나무"
},
{
"id": 14,
"name": "배나무"
}
],
"images": [
{
"id": 1,
"width": 1920,
"height": 1080,
"file_name": "AP_001_HR_20230927_AM_000_000_000_0560_IMG.jpg"
}
],
"annotations": [
{
"id": 1,
"image_id": 1,
"category_id": 1,
"segmentation": [],
"area": 83349.23500000003,
"bbox": [
1392.55,
501.7,
164.95,
505.3
],
"iscrowd": 0,
"attributes": {
"occluded": false,
"rotation": 0.0
}
},
{
"id": 2,
"image_id": 1,
"category_id": 6,
"segmentation": [],
"area": 240878.21939999994,
"bbox": [
990.7,
395.74,
370.89,
649.46
],
"iscrowd": 0,
"attributes": {
"occluded": false,
"rotation": 0.0
}
}
]
}Segmentation 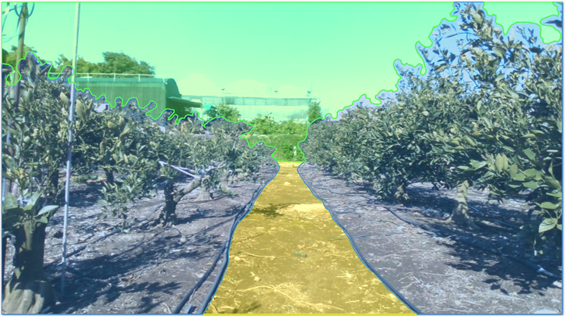
{
"categories": [
{
"id": 1,
"name": "사람"
},
{
"id": 2,
"name": "손수레"
},
{
"id": 3,
"name": "운반차"
},
{
"id": 4,
"name": "트럭"
},
{
"id": 5,
"name": "방제기"
},
{
"id": 6,
"name": "사다리"
},
{
"id": 7,
"name": "과수박스"
},
{
"id": 8,
"name": "창고"
},
{
"id": 9,
"name": "사과"
},
{
"id": 10,
"name": "배_봉지"
},
{
"id": 11,
"name": "비포장"
},
{
"id": 12,
"name": "기타"
},
{
"id": 13,
"name": "사과나무"
},
{
"id": 14,
"name": "배나무"
}
],
"images": [
{
"id": 14,
"width": 1920,
"height": 1080,
"file_name": "AP_004_TP_20231117_PM_000_007_009_0324_IMG.jpg"
}
],
"annotations": [
{
"id": 14,
"image_id": 14,
"category_id": 12,
"segmentation": [
[
2.3,
564.8,
255.6,
534.3,
256.4,
602.0,
274.7,
601.3,
262.2,
610.6,
939.9,
593.6,
1330.2,
599.1,
1563.5,
600.8,
1915.6,
598.4,
1920.0,
732.1,
1223.3,
736.1,
1287.7,
795.7,
12.4,
799.1,
138.9,
741.4,
3.5,
731.7
]
],
"area": 344347.0,
"bbox": [
2.3,
534.3,
1917.7,
264.8
],
"iscrowd": 0,
"attributes": {
"occluded": false
}
}
]
}3D Cuboid 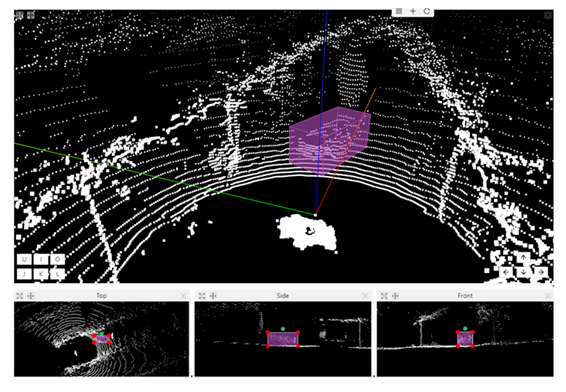
{
"categories": {
"label": {
"labels": [
{
"name": "사람",
"parent": "",
"attributes": []
},
{
"name": "손수레",
"parent": "",
"attributes": []
},
{
"name": "운반차",
"parent": "",
"attributes": []
},
{
"name": "트럭",
"parent": "",
"attributes": []
},
{
"name": "방제기",
"parent": "",
"attributes": []
},
{
"name": "사다리",
"parent": "",
"attributes": []
},
{
"name": "과수박스",
"parent": "",
"attributes": []
},
{
"name": "창고",
"parent": "",
"attributes": []
},
{
"name": "사과",
"parent": "",
"attributes": []
},
{
"name": "배_봉지",
"parent": "",
"attributes": []
},
{
"name": "비포장",
"parent": "",
"attributes": []
},
{
"name": "기타",
"parent": "",
"attributes": []
},
{
"name": "사과나무",
"parent": "",
"attributes": []
},
{
"name": "배나무",
"parent": "",
"attributes": []
}
],
"attributes": [
"occluded"
]
},
"points": {
"items": []
}
},
"items": [
{
"id": "AP_001_HR_20230927_AM_000_000_000_0560_IMG",
"annotations": [
{
"id": 0,
"type": "cuboid_3d",
"attributes": {
"occluded": false
},
"group": 0,
"label_id": 0,
"position": [
4.41,
-1.66,
-0.71
],
"rotation": [
0.0,
0.0,
0.0
],
"scale": [
0.38,
0.48,
1.67
]
},
{
"id": 1,
"type": "cuboid_3d",
"attributes": {
"occluded": false
},
"group": 0,
"label_id": 5,
"position": [
4.42,
-0.51,
-0.53
],
"rotation": [
0.0,
0.0,
0.0
],
"scale": [
0.7,
1.03,
2.09
]
}
],
"attr": {
"frame": 0
},
"point_cloud": {
"path": ""
},
"media": {
"path": ""
}
}
]
} -
데이터셋 구축 담당자
수행기관(주관) : 한국로봇융합연구원
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 홍형길 054-820-2811 honghg@kiro.re.kr 데이터 수집 총괄, AI 모델링 및 알고리즘 개발 수행기관(참여)
수행기관(참여) 기관명 담당업무 ㈜스피어AX, ㈜스마트뱅크 데이터 수집, 데이터 정제, 데이터 가공, 데이터 검수 국립원예특작과학원 과수원 지원 및 자문 농협중앙회 제주지역본부 홍보 및 교육 활등 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 홍형길 054-820-2811 honghg@kiro.re.kr 장선호 054-820-2812 jang1229@kiro.re.kr AI모델 관련 문의처
AI모델 관련 문의처 담당자명 전화번호 이메일 홍형길 054-820-2811 honghg@kiro.re.kr 장선호 054-820-2812 jang1229@kiro.re.kr 저작도구 관련 문의처
저작도구 관련 문의처 담당자명 전화번호 이메일 문영민 053-792-3031 ymmoon@sphereax.com 황정연 010-9840-1440 hjyeon313@gmail.com
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.